21 KiB
XiHuiTong_Linux_Support_Collaborate_With_XiUOS
1. 系统交叉编译
1.1、测试环境
-
Ubuntu 18.04及以上 -
16.04 在编译 debian 文件系统时会出错,暂时未解决,不建议使用
解压 sdk 基础包
在路径 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Source_Code/rk3568_linux/sdk/base/ 下,拷贝到 Ubuntu 环境下,执行如下命令
tar -xzvf som3568_base_0520.tar.gz
cd rk356x_linux
1.2、交叉编译工具链
已内置于 sdk prebuilts 和 buildroot 目录下,不用重新安装
- aarch64-linux-gcc (gcc version 6.3.1 20170404)
- aarch64-buildroot-linux-gnu-gcc (gcc version 9.3.0)
1.3、其他安装包
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool
sudo apt-get install expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support
sudo apt-get install qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib
sudo apt-get install unzip zlib1g-dev
sudo apt-get install device-tree-compiler python-pip ncurses-dev
pip install pyelftools
1.4、打 patch
将 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Source_Code/rk3568_linux/patch 下三个 patch 文件取出
下文 SDK_PATH 指代 rk356x_linux 目录
repo_20210520_DLM3568_device_95d7e1_435a6c_01.patch 放在 $SDK_PATH/device/rockchip 下 repo_20210520_DLM3568_kernel_4f736f_a7164d_01.patch 放在 $SDK_PATH/kernel 下 repo_20210520_DLM3568_buildroot_94742b_86ca23_01.patch 放在 $SDK_PATH/buildroot 下
在对应目录下运行 patch -p1 < *.patch 打包
cd device/rockchip
patch -p1 < *.patch
cd ../../kernel
patch -p1 < *.patch
cd ../buildroot
patch -p1 < *.patch
配置 deconfig 文件和设备树(在 SDK_PATH 目录下)
cd ../
source envsetup.sh //输入74,代表选择 rockchip_rk3568_dlm3568
./build.sh lunch //输入3,代表选择 BoardConfig-rk3568-dlm3568-ddr4-A1.mk配置文件

注:提前将 XiHuiTong_Linux_Support_Collaborate_With_XiUOS\Source_Code\rk3568_linux/dl目录拷贝到$SDK_PATH/buildroot/ 下,这个目录里是大量的压缩包,在编译内核时减少大量下载时间
1.5、编译 Uboot
<SDK_PATH>$ ./build.sh uboot
1.6、编译 Kernel
编译 kernel 前把 5G 网卡驱动设置一下:
打开 $SDK_PATH/kernel/drivers/usb/serial/option.c ,在 option_probe 函数中 unsigned long device_flags = id->driver_info; 一行后面加入如下代码:
if (serial->dev->descriptor.idVendor == cpu_to_le16(0x2CB7) && serial->dev->descriptor.idProduct == cpu_to_le16(0x0104) && serial->interface->cur_altsetting->desc.bInterfaceNumber >= 4)
{
printk(KERN_INFO "Discover the 4th interface for fibocom\n");
return ENODEV;
}
if (serial->dev->descriptor.idVendor == cpu_to_le16(0x2CB7) && serial->dev->descriptor.idProduct == cpu_to_le16(0x010A) && serial->interface->cur_altsetting->desc.bInterfaceNumber >= 2)
{
printk(KERN_INFO "Discover the 4th interface for fibocom\n");
return ENODEV;
}
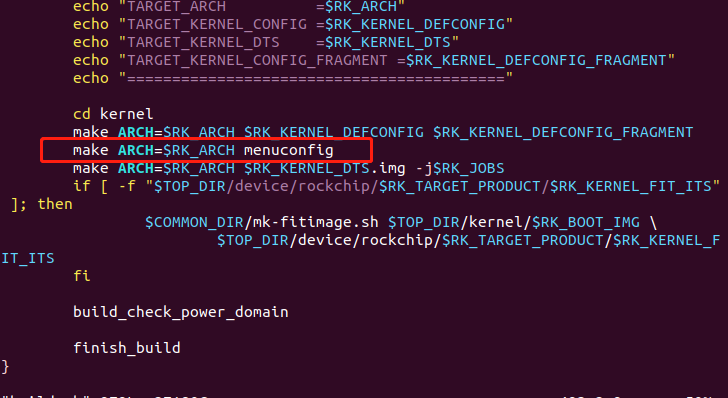
打开 SDK_PATH/build.sh (该文件时间软连接到了 rk356x_linux/device/rockchip/common/build.sh),在该文件的 build_kernel 函数中增加一行(函数起始位置大概在 481 行) :
make ARCH=$RK_ARCH menuconfig
然后编译内核:
<SDK_PATH>$ ./build.sh kernel
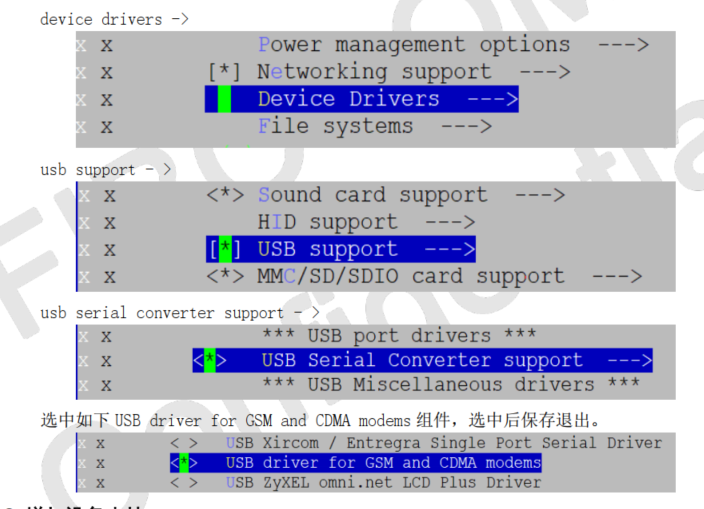
menuconfig 时勾选上如下选项:(Device Drivers 下可以检索如下配置项 USB_SUPPORT、USB_SERIAL、USB_SERIAL_OPTION,?+回车可以快速找到 )
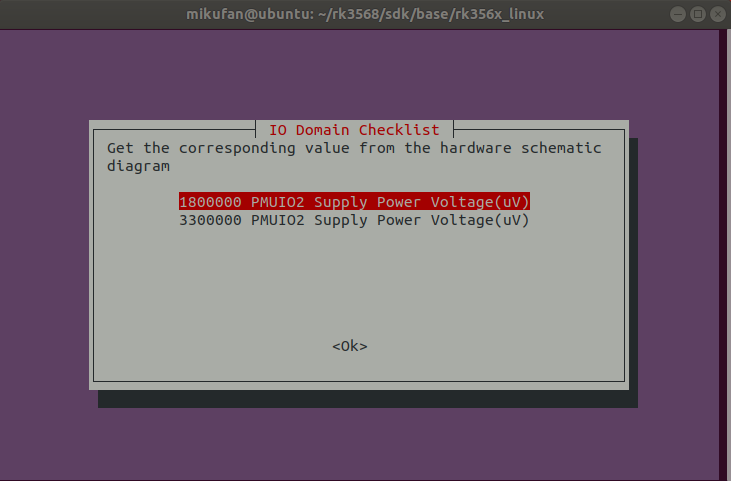
配置电源选项时,全部选择 3300000uV
如下表示配置成功:
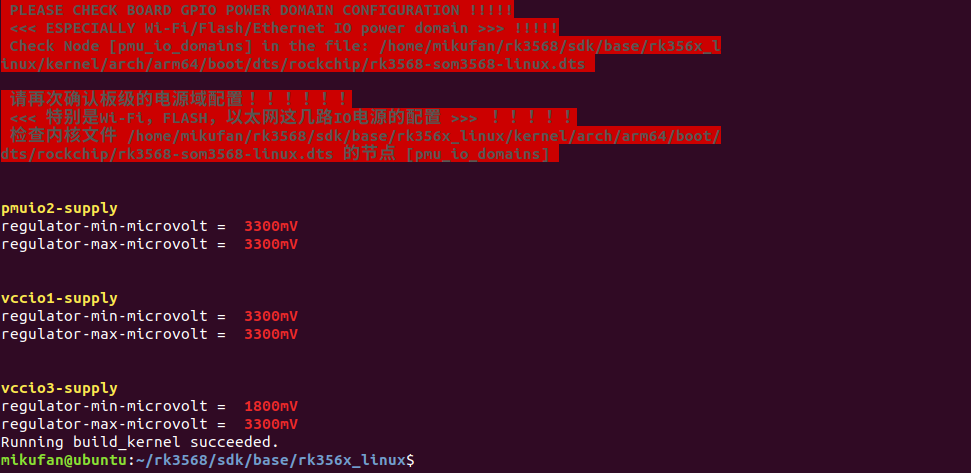
最后显示 "Running build_kernel succeeded." 编译成功
1.7、编译 Recovery
<SDK_PATH>$ sudo ./build.sh recovery
需要特别注意 recovery.img 是包含 kernel.img,所以每次 Kernel 更改后,Recovery 是需要重新打包生成。如下:
<SDK_PATH>$ source envsetup.sh rockchip_芯片名称
<SDK_PATH>$ make recovery-rebuild
<SDK_PATH>$ sudo ./build.sh recovery
这一步需要从网上下载资源,比较耗时。
编译成功会显示"Running build_recovery succeeded."
1.8、编译 Debian
进入目录 ${SDK_PATH}
ubuntu16.04 及以后已不支持 python-support,需要手动安装:
wget http://launchpadlibrarian.net/109052632/python-support_1.0.15_all.deb
sudo dpkg -i python-support_1.0.15_all.deb
由于下载时可能因为被防火墙墙导致下载失败,在 ${SDK_PATH}/debian/ubuntu-build-service/buster-desktop-arm64/configure 文件中加入以下镜像网站配置
echo "I: create configuration"
export LB_BOOTSTRAP_INCLUDE="apt-transport-https gnupg"
lb config \
+ --mirror-bootstrap "http://mirrors.163.com/debian" \
+ --mirror-chroot "http://mirrors.163.com/debian" \
+ --mirror-chroot-security "http://mirrors.163.com/debian-security" \
+ --mirror-binary "http://mirrors.163.com/debian" \
+ --mirror-binary-security "http://mirrors.163.com/debian-security" \
--apt-indices false \
--apt-recommends false \
--apt-secure false \
编译文件系统:
<SDK_PATH>$ ./build.sh debian
若出现如下问题:
noexec or nodev issue /usr/share/debootstrap/functions: line 1450:
..../rootfs/ubuntu-build-service/buster-desktop-arm64/chroot/test-dev-null:
Permission denied E: Cannot install into target '/rootfs/ubuntu-buildservice/buster-desktop-arm64/chroot' mounted with noexec or nodev
解决方法:
sudo mount -o remount,exec,dev /home
若出现 live-build 相关的报错,尝试执行如下命令解决

考虑升级 live-build,参考 http://t.zoukankan.com/cute-p-15185054.html
若又出现若现如下问题:

执行如下操作进行解决:
sudo apt-get install -f
sudo apt-get install python-apt
sudo dpkg -i debian/ubuntu-build-service/packages/*
编译完成会显示:
Running build_debian succeeded. Running build_rootfs succeeded.
编译完成会在 debian/ 目录下生成:linaro-buster-alip-xxxxx-1.tar.gz(xxxxx 表示生成时间戳)。
1.9、生成镜像
<SDK_PATH>$ sudo ./mkfirmware.sh
<SDK_PATH>$ sudo ./build.sh updateimg
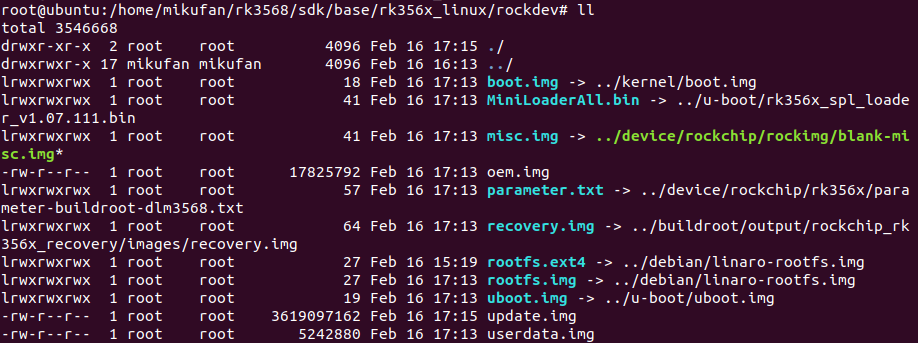
生成 img 在 $SDK_PATH/rockdev 中,update.img 为整机镜像。
2. 烧录镜像及调试
Micro USB 连接上电脑
2.1、安装驱动 DriverAssitant_v5.11.zip
该文件在路径 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Source_Code/rk3568_linux/sdk/base 下的 som3568_base_0520.tar.gz 压缩包里,在 1.1 节解压后的目录里去取即可(在 rk356x_linux/tools/windows 目录下)。取出到自己的 windows 环境下解压压缩包,点击 DriverInstall.exe 进行安装。
2.2、打开 RKDevTool.exe
在 2.1 节相同的路径下取出 RKDevTool_Release_v2.84.zip 到自己的 windows 环境下,解压压缩包找到 RKDevTool.exe。
注:若一直提示找不到设备,按住 "Update" 按键并重新上电,会提示"发现一个 LOADER 设备",此时直接烧录即可 (不需要执行图片中第 3 步的切换)
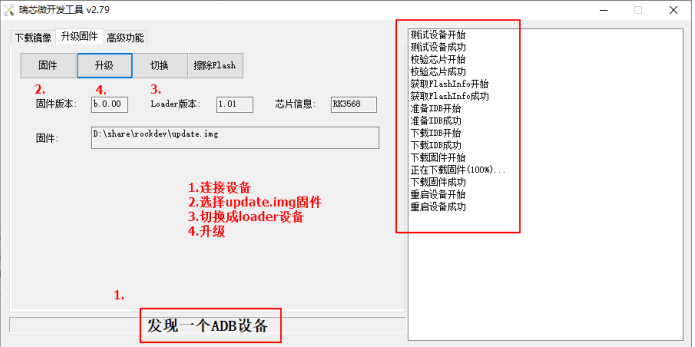
1、连接设备
2、在打开工具的界面点击"升级固件"→“固件”,选择 1.9 节里编译生成的 update.img 文件,在 rk356x_linux\rockdev\ 路径下,选择固件后稍等片刻,等待固件版本、Loader 版本、芯片信息等加载出来
3、点击“切换”,等待切换完成
4、点击"升级",右侧会显示升级信息,等出现重启设备成功说明升级完成
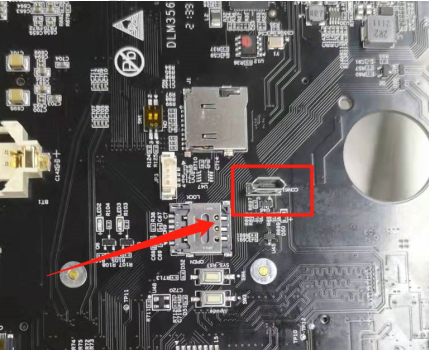
调试口在电源侧,从外向里分别为 GND、TX、RX 串口连接的波特率为 1500000
板子的引脚图和实物图如下所示:


注意这里使用的串口模块是这种黑色串口模块,实验室的另一种白色串口模块连接不上。

然后可以使用系统了,同样为了防止被墙,先更换下 apt 源,接上网线后更新一下 apt 源
第一步:打开 sources.list 文件
sudo vim /etc/apt/sources.list
第二步:将以下内容复制到 sources.list 文件(复制后在 vi 模式 ctrl+shift+v 进行复制)
deb http://mirrors.aliyun.com/debian/ buster main non-free contrib
deb http://mirrors.aliyun.com/debian-security buster/updates main
deb http://mirrors.aliyun.com/debian/ buster-updates main non-free contrib
deb http://mirrors.aliyun.com/debian/ buster-backports main non-free contrib
deb-src http://mirrors.aliyun.com/debian-security buster/updates main
deb-src http://mirrors.aliyun.com/debian/ buster main non-free contrib
deb-src http://mirrors.aliyun.com/debian/ buster-updates main non-free contrib
deb-src http://mirrors.aliyun.com/debian/ buster-backports main non-free contrib
第三步:更新源和系统软件
sudo apt-get update
sudo apt-get upgrade
git 仓上保存了一份包含了已经编译好且包含 emmc 扩容后的 update.img 文件,可以不用进行编译直接拿来烧录使用。可以免去编译这一过程,但依然建议初次使用该文档的开发人员,从头至尾编译一边以加深印象。
update.img 保存路径:XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Reference_Doc/ 可直接烧录文件
3. 5G 网卡调试
sudo apt-get install microcom
sudo apt-get install udhcpc
注:先把 micro usb 烧录线拔下,否则 5G 卡无法识别!
先执行 lsusb 确认系统识别到 5G 网卡:
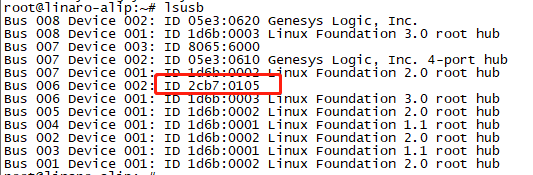
如果没有 lsusb 命令先执行如下命令进行安装
sudo apt-get install usbutils
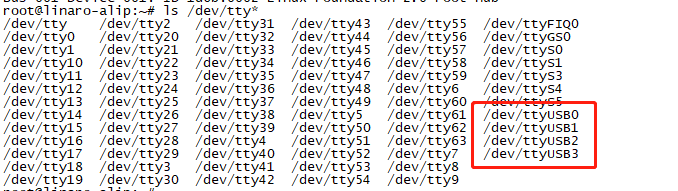
再执行 ls /dev/tty* 查看 tty 设备:
先关闭以太网卡:
ifconfig eth0 down
进入串口工具:
microcom -s 115200 -p /dev/ttyUSB1
切换到 ECM 拨号模式:
at+gtusbmode=18
查询 sim 卡是否插入:
at+cpin?
查看 5G 网络注册状态:
at+cgreg?
拨号:
at+gtrndis=0,1
at+gtrndis=1,1
在 AT 模式下退出该模式,ctrl+\然后输入 quit 即可退出。
拨号完成后退出串口工具,自动获取 ip:
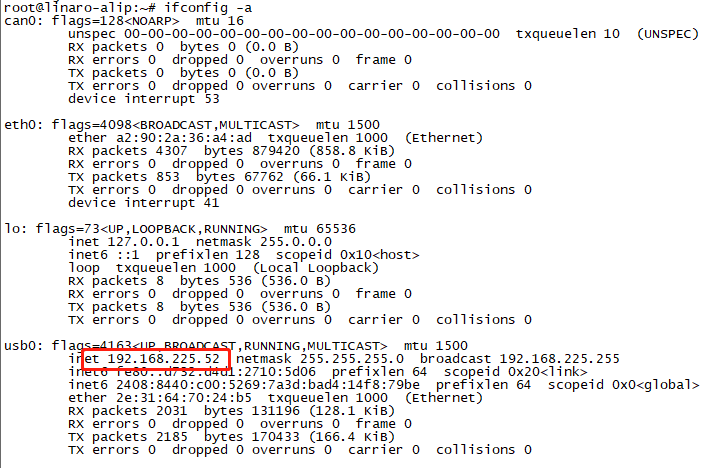
udhcpc -i usb0
ifconfig usb0 up
此时 ifconfig 应该能看到 usb0 网卡状态:
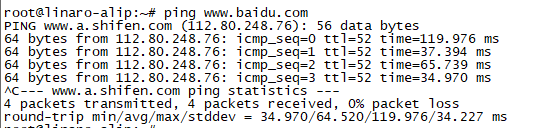
ping 测试成功
ping www.baidu.com
5. wifi 模块调试
WIFI 模块为 USB 接口,采用南方硅谷 ssv6x5x 芯片。
总体参考《南方硅谷 ssv6x5x 驱动移植用户指南_20200818》
驱动编译
需要的驱动文件为 Source Code\Wifi\Wifi Related Tools\6155.6152 驱动.zip 这个压缩文件里,有个压缩文件 L.SMAC.19Q3.2042.02_FH.tar.gz,将该文件 copy 到 rk356x_linux/kernel/drivers/net/wireless/ 下,解压为 ssv6x5x 文件夹
cd rk356x_linux/kernel/drivers/net/wireless/
tar -zxvf L.SMAC.19Q3.2042.02_FH.tar.gz
mv L.SMAC.19Q3.2042.02 ssv6x5x
如果是移植到 Linux 平台,可参考 platforms 下 t20 平台的相关配置文件。
将以上平台相关文件 copy 到 ssv6x5x 目录,进入 ssv6x5x 目录下:
cd ssv6x5x
cp platforms/platform-config.mak .
cp platforms/t20.cfg ssv6x5x.cfg
cp platforms/t20-generic-wlan.c ssv6x5x-generic-wlan.c
cp platforms/t20-wifi.cfg image/ssv6x5x-wifi.cfg
cp platforms/t20-wifi.cfg ssv6x5x-wifi.cfg
根据平台类型 copy 出一份正确的 makefile, 因为 ssv6x5x/makefile 默认驱动目录带的是 ubuntu 环境的 makefile 文件,不能直接使用。
cp Makefile.cross_linux Makefile
将 ssv6x5x 驱动存放在内核目录 rk356x_linux/kernel/drivers/net/wireless/ 路径下。
修改 drivers/net/wireless 目录的 Makefile,新增
obj-$(CONFIG_SSV6X5X) += ssv6x5x/

以及 Kconfig 文件,新增
source "drivers/net/wireless/ssv6x5x/Kconfig"

在 rk356x_linux/kernel 路径下重新配置内核 menuconfig:
sudo make ARCH=arm64 CROSS_COMPILE=aarch64-himix100-linux- menuconfig
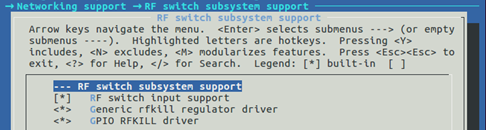
networking support -> RF switch subsystem support ->下面的都选上(在 Networking support 中快速检索,搜索 RFKILL)
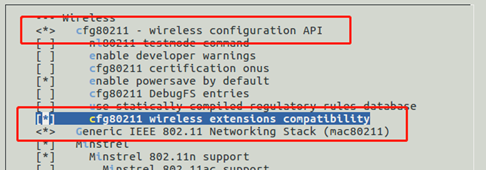
networking support -> wireless ->cfg80211 - wireless configuration API
networking support -> wireless ->Generic ...(mac80211)
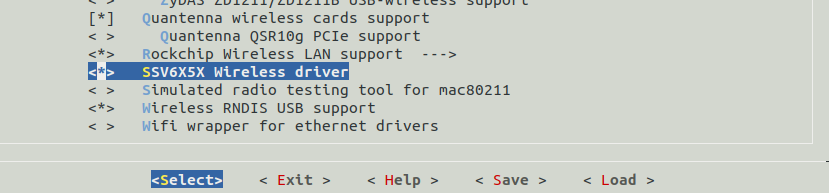
然后就可以选上驱动:
Device Drivers -> Network device support -> Wireless LAN -> SSV6X5X Wireless driver
(可在 device drivers 中快速检索,依次搜索 NETDEVICES、WLAN、SSV6X5X)
在在 rk356x_linux 根目录下编译驱动,并重新编译一遍内核和 recovery, 编译生成的 ssv6x5x.ko 在 kernel/drivers/net/wireless/ssv6x5x 下
sudo ./build.sh modules
sudo ./build.sh kernel (如果又进入menuconfig,那就检查一下上面几个项目是否全部勾选上了)
sudo ./build.sh recovery
同样,重新打包生成镜像文件:
sudo ./mkfirmware.sh
sudo ./build.sh updateimg
按照烧录流程重新烧录
驱动运行
确认系统是否识别到 wifi,对于 usb wifi,执行 lsusb 可以看到如下则确认识别 (for 6155/6255 型号的芯片)
Bus 005 Device 003: ID 8065:6000
接入以太网安装相关包:
sudo apt-get update && sudo apt-get install vim usbutils net-tools microcom udhcpc wireless-tools
复制相关文件到板子的文件系统中
复制可以用 U 盘复制,拷贝到 U 盘后插入到矽灵通上,fdisk -l 查看找到 usb 设备,例如 /dev/sda1
执行挂载进行拷贝
mkdir -p /mnt/usb
mount /dev/sda1 /mnt/usb
复制 ssv6x5x/image/ssv6x5x-wifi.cfg 到板子文件系统下 /etc/firmware/ (若无 firmware 文件夹新建即可)
复制 ssv6x5x.ko 到板子任意目录下
加载驱动 ssv6x5x.ko
执行如下指令:(stacfgpath= 路径请根据实际路径填写)
insmod ssv6x5x.ko stacfgpath=/etc/firmware/ssv6x5x-wifi.cfg
insmod 结束:
insmod 完成后 wifi 可能会重复扫描周围网络,暂时不用管,接着执行下面步骤可以解决:
ifconfig -a 查看网卡名称,这边是 wlxa47d9fb5b922 (具体要看板子)
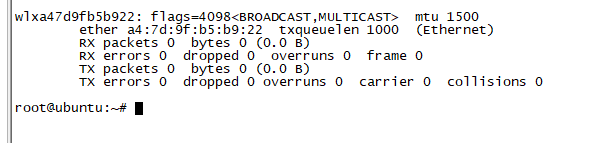
为了后续操作方便,可以对网卡重命名为 wlan0 (非必要):
ip link set wlxa47d9fb5b922 down
ip link set wlxa47d9fb5b922 name wlan0
ip link set wlan0 up
执行: ifconfig eth0 down && ifconfig wlan0 up

WIFI 网络连接
扫描周围无线网络:
iwlist wlan0 scan
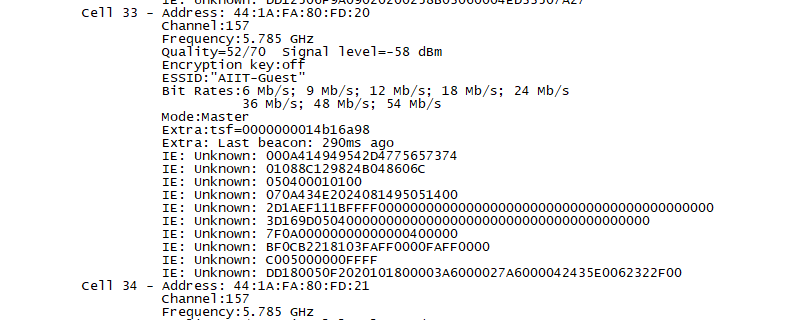
连接网络:
iwconfig wlan0 essid "AIIT-Guest"

dhcp 获取 ip
udhcpc -i wlan0

ip 分配成功后,进行 ping 测试,需要 -I 指定网卡
ping 114.114.114.114 -I wlan0
ping www.baidu.com -I wlan0

5. USB 调试
首先通过 fdisk -l 查看插入的 usb 设备,如下我这里插入的 u 盘是 /dev/sda2
Device Boot Start End Sectors Size Id Type
/dev/sda2 2 15149055 15149054 7.2G c W95 FAT32 (LBA)
进行挂载
mkdir /root/udisk
mount /dev/sda2 udisk

6. SD 卡调试
首先通过 fdisk -l 查看插入的 SD 卡,如下我这里插入的 SD 卡是 /dev/mmcblk1p1
Device Boot Start End Sectors Size Id Type
/dev/mmcblk1p1 8192 62333951 62325760 29.7G c W95 FAT32 (LBA)
进行挂载
mkdir /root/sdcard
mount /dev/mmcblk1p1 sdcard/

7. 显示图片
烧入 Debian 镜像后,把要显示的图片通过 SD 卡或者 U 盘拷贝进板子,点击打开后全屏幕显示即可。
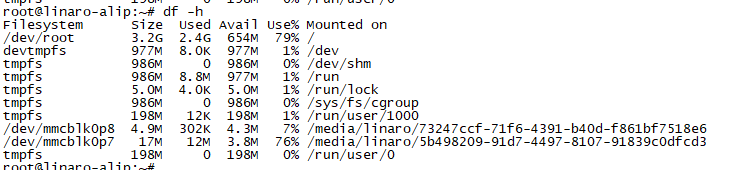
8. emmc 扩容
rk3568 配置的是 16GB 的 emmc,但初始只有 3.2GB:
为了充分利用剩余空间,需要修改烧录文件 rk356x_linux/rockdev/parameter.txt,该文件实际上软连接到了(rk356x_linux/device/rockchip/rk356x/rk356x/parameter-buildroot-dlm3568.txt)。在生成 update.img 之前先修改 parameter 为以下内容,其中 rootfs 一项即对应文件系统所占大小,格式为 "size@LBA(rootfs)"
FIRMWARE_VER: 1.0
MACHINE_MODEL: RK3568
MACHINE_ID: 007
MANUFACTURER: RK3568
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00010000@0x00008000(boot),0x00010000@0x00018000(recovery),0x00010000@0x00028000(backup),0x017F6000@0x00038000(rootfs),0x00040000@0x0182E000(oem),0x0000A000@0x0186E000(userdata),-@0x01878000(data:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
然后重新打包生成整机镜像:
<SDK_PATH>$ sudo ./build.sh updateimg
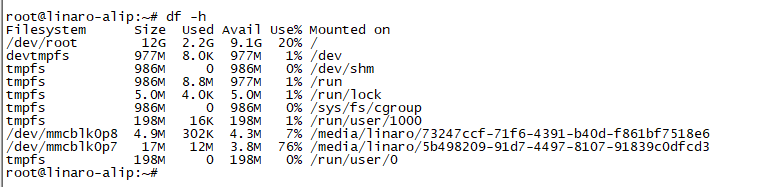
烧录完成后,此时配置可能并未刷新,需要更新下 blocks:
resize2fs /dev/mmcblk0p6

然后 df -h 可以看到文件系统大小已经扩容成为 12G:
9. AIM16T 从模式烧录
由于出厂时 AIM16T 镜像烧录错误,EP 模式烧成了 RC 模式,所以现在重新烧录,后盖有遮挡,需要去掉螺丝打开后盖。
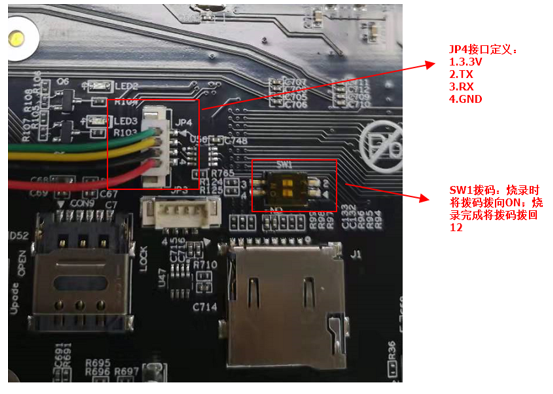
使用 USB 转 TTL 串口,接入 AIM16T 烧录口(烧录口如下图所示的 JP4)

拨码开关拨到 on(拨码开关的位置如下图所示),拨码开关拨到 on 后需要重新上电
解压 fwu_tool_mlu220.rar 文件,压缩包位于XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Reference_Doc/AIM16T_EP_Burn下,解压后更改文件目录权限
如果没有 rar 相关的命令,需要先安装,如果有这一步忽略
sudo apt-get install rar
sudo apt-get install unrar
把 fwu_tool_mlu220.rar 复制到 linux 环境下,进行解压
unrar x fwu_tool_mlu220.rar
chmod -R 777 fwu_tool_mlu220
进入目录,执行 EP 模式镜像烧录
cd fwu_tool_mlu220
sudo ./start_burn.sh 3
以下表示烧录完成
将拨码开关拨回 12,重新上电,在 rk3568 命令行中输入 lspci 命令,若能找到以下设备则表示 EP 模式烧录成功

接下来在 AIM16T 上运行 yolo_demo 来检验,这一步需要四个文件:
(1)firmware_sys.img、cambricon-drv.ko、cnmon 这三个文件位于 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Source_Code/AIM16T 下的 rk3568_aim16t.tar 压缩包内,从压缩包内取出
(2)yolo_demo_rk3568.tar.gz 位于 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Source_Code 下
这四个文件用 nfs 或 U 盘拷贝进板子(U 盘的挂载方式见第 4 节 USB 调试,如下 udisk 为挂载后的路径),把 AIM16T 驱动放在对应路径:
mkdir -p /lib/firmware/cambricon/mlu220
cp -a /root/udisk/firmware_sys.img /lib/firmware/cambricon/mlu220
加载 AIM16T 模组:
cp /root/udisk/cambricon-drv.ko /root
cd /root
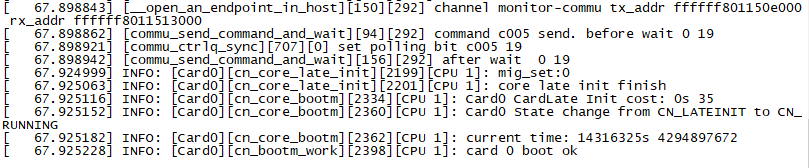
insmod cambricon-drv.ko
以下表示模组加载成功:
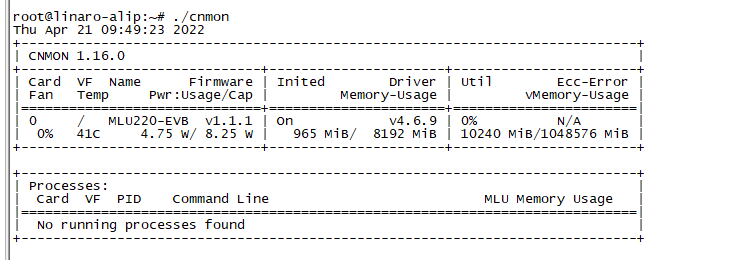
此时运行 cnmon 脚本可以查看到 mlu220 设备的一些信息:
cp /root/udisk/cnmon /root
chmod 777 cnmon
./cnmon
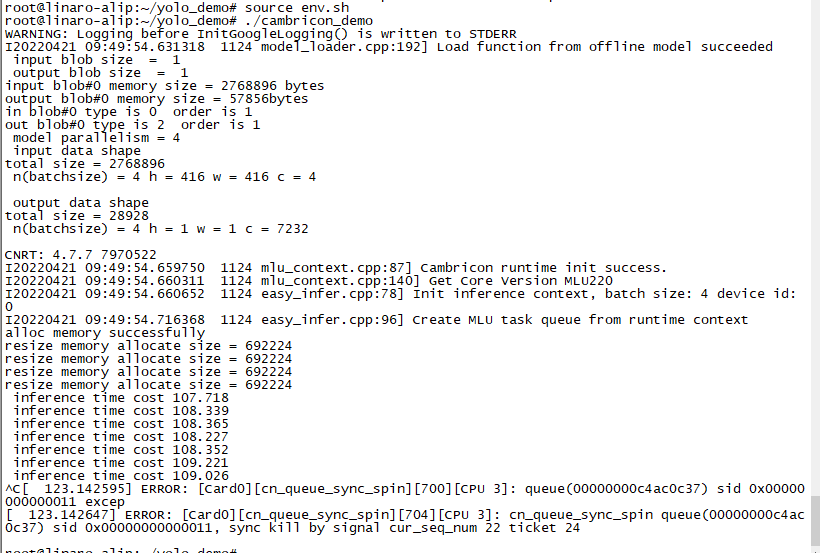
解压 yolo_demo 并运行推理测试:
mkdir -p /root/yolo
cp /root/udisk/yolo_demo_rk3568.tar.gz /root/yolo
cd /root/yolo
tar -zxf yolo_demo_rk3568.tar.gz
cd yolo_demo
source ./env.sh
./cambricon_demo
可以看到 demo 正常运行:
10.RISCV-K210 烧录、调试
烧录/调试:RISCV 调试引脚同烧录引脚,均为 CO_CPU_ISP_TX/CO_CPU_ISP_RX。除了这两根线外,还需要一根 GND。串口波特率均为 115200。
引脚图可以参考 2.2 节

用 K-Flash.exe 工具进行 bin 包的烧录。K-Flash.exe 工具位于 XiHuiTong_Linux_Support_Collaborate_With_XiUOS/Reference_Doc 目录下:

在 ① 选择串口 com 号
在 ② 处选择波特率,选择 115200
在 ③ 处选择编译出的 nuttx.bin 文件
设备在上电时确保 Boot 和 GND 短接,这是升级模式。
点击 ④ 处 Flash 开始烧录,显示烧录完成即可,中间有报错的话,重新 Flash。
烧写完毕重新上电,进入 shell。
