diff --git a/docs/.vuepress/config.js b/docs/.vuepress/config.js
index 2453978..493971c 100755
--- a/docs/.vuepress/config.js
+++ b/docs/.vuepress/config.js
@@ -1,6 +1,8 @@
const { description } = require('../../package')
const { name } = require('../../package')
+const { getSidebarByCategory } = require('./sidebar')
+
module.exports = {
/**
* Ref:https://v1.vuepress.vuejs.org/config/#title
@@ -88,15 +90,24 @@ module.exports = {
sidebar: {
'/doc/': [
{
- title: '文档',
- collapsable: false,
- children: [
- '',
- 'intro',
- 'kernel',
- 'appdev',
- 'api',
- ]
+ title: '简介',
+ children: getSidebarByCategory('intro','en')
+ },
+ {
+ title: '内核',
+ children: getSidebarByCategory('kernel','en')
+ },
+ {
+ title: '硬件支持',
+ children: getSidebarByCategory('framework','en')
+ },
+ {
+ title: '通信协议',
+ children: getSidebarByCategory('communication','en')
+ },
+ {
+ title: '传感器',
+ children: getSidebarByCategory('sensor','en')
}
],
}
diff --git a/docs/.vuepress/enhanceApp.js b/docs/.vuepress/enhanceApp.js
index 8452a86..58763d8 100755
--- a/docs/.vuepress/enhanceApp.js
+++ b/docs/.vuepress/enhanceApp.js
@@ -3,6 +3,8 @@
*
* https://v1.vuepress.vuejs.org/guide/basic-config.html#app-level-enhancements
*/
+import Element from 'element-ui'
+import 'element-ui/lib/theme-chalk/index.css'
export default ({
Vue, // the version of Vue being used in the VuePress app
@@ -11,4 +13,5 @@ export default ({
siteData // site metadata
}) => {
// ...apply enhancements for the site.
+ Vue.use(Element)
}
diff --git a/docs/.vuepress/sidebar.js b/docs/.vuepress/sidebar.js
new file mode 100755
index 0000000..dd32f88
--- /dev/null
+++ b/docs/.vuepress/sidebar.js
@@ -0,0 +1,61 @@
+const sidebar = {
+ 'intro': [
+ '/doc/intro',
+ '/doc/constructenv/bianyi',
+ '/doc/constructenv/debug',
+ '/doc/constructenv/goujian'
+ ],
+ 'kernel': [
+ '/doc/kernel/mm',
+ '/doc/kernel/task',
+ '/doc/kernel/synchron',
+ '/doc/kernel/threadcommunication'
+ ],
+ 'framework': [
+ '/doc/hwsupport/aiit-arm32',
+ '/doc/hwsupport/stm32f407-st-discovery',
+ '/doc/hwsupport/stm32f407zgt6',
+ '/doc/hwsupport/hifive1-rev',
+ '/doc/hwsupport/maxgo',
+ '/doc/hwsupport/kd233'
+ ],
+ 'communication': [
+ '/doc/communication/4G',
+ '/doc/communication/5G',
+ '/doc/communication/at',
+ '/doc/communication/Bluetooth',
+ '/doc/communication/CAN',
+ '/doc/communication/ethernet',
+ '/doc/communication/LORA',
+ '/doc/communication/mymqtt',
+ '/doc/communication/NB-IOT',
+ '/doc/communication/rs485',
+ '/doc/communication/WiFi',
+ '/doc/communication/Zigbee'
+ ],
+ 'sensor': [
+ '/doc/sensor/force_sensor',
+ '/doc/sensor/gas_sensor',
+ '/doc/sensor/heat_sensor',
+ '/doc/sensor/humidity_sensor',
+ '/doc/sensor/magneto_sensor',
+ '/doc/sensor/photoelec_sensor',
+ '/doc/sensor/pressure_sensor',
+ '/doc/sensor/voice_sensor'
+ ]
+}
+
+
+function getSidebarByCategory(category, lang = 'en') {
+ const links = JSON.parse(JSON.stringify(sidebar[category])) // Deep clone
+ return links.map(link => {
+ if (lang != 'en' && link.startsWith('/')) {
+ return `/${lang}${link}`
+ }
+ return link
+ })
+}
+
+module.exports = {
+ getSidebarByCategory
+}
\ No newline at end of file
diff --git a/docs/doc/communication/4G.md b/docs/doc/communication/4G.md
new file mode 100644
index 0000000..00b25fc
--- /dev/null
+++ b/docs/doc/communication/4G.md
@@ -0,0 +1,258 @@
+# 4G
+
+## 模块介绍
+
+
+
+
+
+
+
+
+ EC20 Mini PCIe采用标准的Mini PCIe封装
+ 支持LTE,UMTS和GSM/GPRS网络
+ 最大上行速率为50Mbps,最大下行速率为100Mbps
+ 在缺乏3G和4G网络的偏远地区也能正常工作
+
+
+
+
+
+
+
+ LTE 版本
+
+
+ 3GPP E-UTRA Release 9
+
+
+
+
+ 频带宽度
+
+
+ 1.4/3/5/10/15/20MHz
+
+
+
+
+ 天线 DL
+
+
+ MIMO 2×2, supports Rx-diversity
+
+
+
+
+ 供电电压
+
+
+ 3.3V~ 3.6V, 典型值:3.3V
+
+
+
+
+ 工作温度
+
+
+ -40 °C ~ +80 °C
+
+
+
+
+ 模块尺寸
+
+
+ 51.0 x 30.0 x 4.9mm
+
+
+
+
+
+
+
+
+
+
+
+ 产品名称:
+ Air720H 4G LTE 模块
+ 产品型号:Air720H Module
+ 四模全网通4G模块
+ 移动+电信+联通
+ 统统支持
+
+
+
+
+
+
+
+ LTE 版本
+
+
+ 3GPP E-UTRA Release 9
+
+
+
+
+ 带宽
+
+
+ 1.4/3/5/10/15/20MHz
+
+
+
+
+ 温度范围
+
+
+ -40℃ ~ +85℃
+
+
+
+
+ 模块尺寸
+
+
+ 32.0 x 29.0 x 2.4mm
+
+
+
+
+ 封装方式
+
+
+ LCC封装
+
+
+
+
+ 供电电压
+
+
+ 3.3V ~ 4.3V,典型值 3.8V
+
+
+
+
+
+
+
+
+
+
+
+ 专为 M2M 和 IoT 应用而设计的LTE Cat 4 无线模块
+ 多网络制式覆盖
+ 支持FOTA远程升级功能
+ MIMO技术可满足无线通信系统对数据速率和连接可靠性的要求
+
+
+
+
+
+
+
+ LTE
+
+
+ LTE FDD:最大 150Mbps(DL)/最大50Mbps(UL)
+ LTE TDD:最大 130Mbps(DL)/最大30Mbps(UL)
+
+
+
+
+ 带宽
+
+
+ 1.4/3/5/10/15/20MHz
+
+
+
+
+ 温度范围
+
+
+ -40℃ ~ +85℃
+
+
+
+
+ 模块尺寸
+
+
+ 29.0 x 32.0 x 2.4mm
+
+
+
+
+ 封装方式
+
+
+ LCC封装
+
+
+
+
+ 供电电压
+
+
+ 3.4V ~ 4.5V,典型值 3.8V
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ 序号
+ HC-08模块
+ 备注
+
+
+ 1
+ VCC(第27引脚)
+ 模块3.3V 供电正
+
+
+ 2
+ GND(第28引脚)
+ 模块公共地
+
+
+ 3
+ RXD(第29引脚)
+ UART输入口,3.3V TTL电平
+
+
+ 4
+ TXD(第30引脚)
+ UART输出口,3.3V TTL电平
+
+
+
+
+
+
+
+
+
+参数
+数值
+
+
+供电电压
+ 2.1~3.63 V,典型值 3.3 V (GPIO 电压域: 1.8 V)
+
+
+温度范围
+正常工作温度:-35 °C ~ +75 °C
+
+
+外形尺寸
+17.7 mm × 15.8 mm × 2.0 mm
+
+
+输出功率
+23 dBm ±2 dB
+
+
+重传灵敏度
+-129dBm
+
+
+Cat NB1 功耗(典型值)
+3.5 μA @ PSM
+
+
+Cat NB2 功耗(典型值)
+待定
+
+
+
+
+
+
+
+
+
+## 模块配置和代码树
+
+
+
+
+
+
+
+
+
+
+
+
+指令
+描述
+
+
+AT
+测试 AT 启动
+
+AT+RST
+重启模块
+
+
+AT+GMR
+查看版本信息
+
+
+AT+GSLP
+进 ⼊ 入 Deep-sleep 模式
+
+ATE
+开关回显功能
+
+
+AT+RESTORE
+恢复出 ⼚ 厂设置
+
+AT+UART_CUR
+UART 当前临时配置
+
+AT+UART_DEF
+UART 默认配置,保存到 Flash
+
+AT+SLEEP
+设置 sleep 模式
+
+AT+WAKEUPGPIO
+设置 GPIO 唤醒 Light-sleep 模式
+
+AT+RFPOWER
+设置 RF TX Power 上限
+
+AT+RFVDD
+根据 VDD33 设置 RF TX Power
+
+AT+SYSRAM
+查询系统当前剩余内存
+
+
+AT+SYSADC
+查询 ADC 值
+
+AT+SYSIOSETCFG
+设置 IO ⼯工作模式
+
+AT+SYSIOGETCFG
+查询 IO ⼯工作模式
+
+AT+SYSGPIODIR
+设置 GPIO ⼯工作为输⼊入或输出
+
+AT+SYSGPIOWRITE
+设置 GPIO 的输出电平
+
+AT+SYSGPIOREAD
+读取 GPIO 的电平状态
+
+AT+SYSMSG_CUR
+设置当前系统消息
+
+
+AT+SYSMSG_DEF
+设置默认系统消息
+
+
+
+
+
+
diff --git a/docs/doc/communication/ethernet.md b/docs/doc/communication/ethernet.md
new file mode 100644
index 0000000..9adac67
--- /dev/null
+++ b/docs/doc/communication/ethernet.md
@@ -0,0 +1,948 @@
+# ethernet
+
+
+
+
+
+
+
+
+分类
+参数
+数值
+
+
+硬件参数
+工作电压
+DC 3.0~3.6 V,(3.3V 最佳)
+
+
+工作电流
+130mA@3.3V
+
+
+网口规格
+RJ45、10/100Mbps、交叉直连自适应
+
+
+封装形式
+插针式封装
+
+
+串口波特率
+600~1M(bps)
+
+
+软件参数
+网络协议
+IP、TCP、UDP、DHCP、DNS、HTTP、ARP、ICMP、Web socket
+
+
+IP 获取方式
+静态 IP、DHCP
+
+
+域名解析
+支持
+
+
+用户配置
+软件配置,网页配置,AT 指令配置
+
+
+
+
+简单透传方式
+TCP Server/TCP Client/UDP Server/UDP Client
+
+
+
+
+Modbus
+支持 Modbus 网关
+
+
+
+
+网页转串口
+支持 WebSocket 通信方式的网页转串口
+
+
+
+
+Httpd Client
+支持
+
+
+
+
+类 RFC2217
+支持
+
+
+
+
+自定义网页
+支持
+
+
+网络缓存
+发送:16Kbyte;接收:16Kbyte;
+
+
+串口缓存
+发送:2Kbyte;接收:2Kbyte;
+
+
+平均传输延时
+局域网内<10ms
+
+
+配套软件
+虚拟串口软件、透传云测试软件、参数设置软件
+
+
+认证
+CE、FCC、ROHS
+
+
+可靠等级
+1.5KV 电磁隔离
+
+
+尺寸
+35.0x19.39x18.25 mm(L*W*H)
+
+
+工作温度
+-40~85℃
+
+
+
+
+
+
+
+
+
+
+## 模块配置和代码树
+
+
+
本文档将介绍如何在个人pc设备上构建编译环境来编译 XiUOS
+操作系统, 需要注意的是, 目前 XiUOS 暂时只支持在Linux系统上编译。
+
+## 硬件安装
+XiUOS 是在Ubuntu 16.04上开发与测试的(Ubuntu 18.04、20.04版本也支持),因此我们推荐您使用Ubuntu 16.04版本的系统执行编译环境搭建。
+> * Ubuntu下载网址
+>> [here](https://ubuntu.com/download/desktop)
+
+
+## 依赖包安装
+XiUOS 的源码和相关文档介绍使用git进行集成管理,建议开发者使用git工具进行版本控制和分支管理
+> * git配置
+
+ $ git config --global user.name "your name"
+ $ git config --global user.email "your email"
+> * [XiUOS源码网址](https://ubuntu.com/download/desktop)
+
+## 工具链
+arm-none-eabi 编译工具, 安装到Ubuntu的默认路径/usr/bin/arm-none-eabi-
+>> 1. 命令行下载
+>>> $ sudo apt-get install gcc-arm-none-eabi
+>> 2. 源码下载
+>>> [ARM官网下载](https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads)
+> * RISC-V下编译需要安装riscv-none-embed- 编译工具, 安装到Ubuntu的默认路径/opt/
+>> [下载网址](https://github.com/xpack-dev-tools/riscv-none-embed-gcc-xpack/releases/), 根据需求选择不同的版本
+>> 操作方法,以xpack-riscv-none-embed-gcc-linux-x64.tar.gz为例
+>>> $ tar -zxvf xpack-riscv-none-embed-gcc-linux-x64.tar.gz -C /opt/
+## 烧写工具
+> * ARM下烧写软件(ST-LINK)
+>> 下载源码
+
+ git clone https://github.com/texane/stlink.git
+
+
+
+> * RISC-V下烧写软件(KFLASH)
+
+ $ sudo pip3 install kflash
+ // 如果在安装工具失败,则执行一下命令
+ $ sudo python -m pip install kflash
+ $ sudo python3 -m pip install kflash
+ $ sudo pip install kflash
+ $ sudo pip2 install kflash
+
+## FAQ
+
+
+
+
+> 尝试借助gitee下载源码
+
+
+
+
+> * Operation feedback: enable the users to clearly perceive their operations by style updates and interactive effects;
+> * Visual feedback: reflect current state by updating or rearranging elements of the page.
+
+
+
+
+> * Simplify the process: keep operating process simple and intuitive;
+> * Definite and clear: enunciate your intentions clearly so that the users can quickly understand and make decisions;
+> * Easy to identify: the interface should be straightforward, which helps the users to identify and frees them from memorizing and recalling.
+
+
+
+
+> * Decision making: giving advices about operations is acceptable, but do not make decisions for the users;
+> * Controlled consequences: users should be granted the freedom to operate, including canceling, aborting or terminating current operation.
+
+
+
+
+
+
diff --git a/docs/doc/constructenv/debug.md b/docs/doc/constructenv/debug.md
new file mode 100755
index 0000000..775719e
--- /dev/null
+++ b/docs/doc/constructenv/debug.md
@@ -0,0 +1,115 @@
+# 编译步骤
+
+## 前言
+
+本文档将介绍XiUOS 使用jlink软件的配置、调试过程。
+
+## 软件安装
++ jlink包安装
+
+第一步,进入jlink官网[下载网址](https://www.segger.com/downloads/jlink)
+
+
+
+
+
+
XiUOS 中下载的kendryte-openocd-0.2.3-ubuntu64.tar.gz
+
+第二步,安装openocd
+
+ $ sudo mv kendryte-openocd-0.2.2-ubuntu64.tar.gz /opt
+ $ cd /opt
+ $ sudo tar -zxvf kendryte-openocd-0.2.2-ubuntu64.tar.gz
+
+
+
+
+
+ $ sudo apt install libusb-dev libftdi-dev libhidapi-dev
+
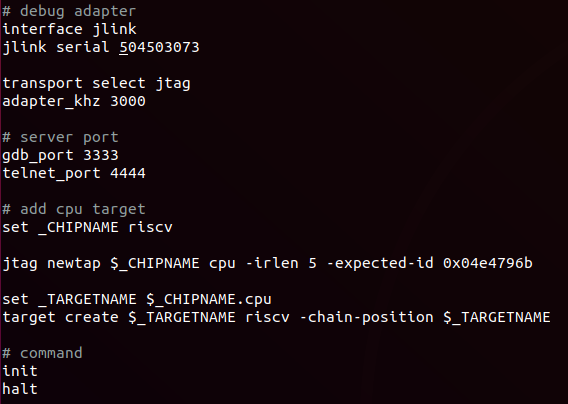
+第三步,openocd文件配置
+
+打开配置文件,修改第三行 jlink serial 504503073的504503073为具体JLINK设备的标签。
+
+ $ cd /opt/kendryte-openocd
+ $ vim ctl/openocd.cfg
+
+
+
+
+
+
+
+
+
+
+
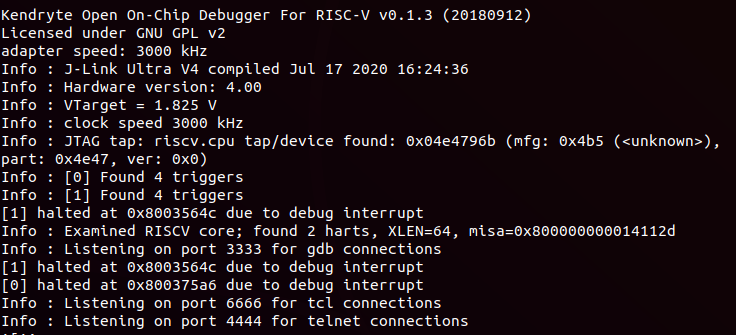
+> 重新连接JLINK设备。
+
+
+
+
+> * Operation feedback: enable the users to clearly perceive their operations by style updates and interactive effects;
+> * Visual feedback: reflect current state by updating or rearranging elements of the page.
+
+
+
+
+
+
\ No newline at end of file
diff --git a/docs/doc/constructenv/goujian.md b/docs/doc/constructenv/goujian.md
new file mode 100755
index 0000000..f055390
--- /dev/null
+++ b/docs/doc/constructenv/goujian.md
@@ -0,0 +1,94 @@
+# 编译步骤
+
+## 前言
+本文档将介绍XiUOS 分别在基于ARM和RISC-V架构的开发板上的编译、烧录和运行的过程。包括开发板选择及配置初始化、编译命令等信息。
+
+
+## 开发板的选择及配置初始化
+在执行编译之前,我们需要先确定XiUOS 系统要运行在哪个开发板上,然后针对具体的开发板设置相关的配置信息。
+
++ 开发板的选择
+为了查看XiUOS 支持的开发板种类,可以执行以下命令,也可以[查看支持的开发板](/hardwaresupport/arm32/stm32f407-st-discovery.html)。
+
+ $ make BOARD=list
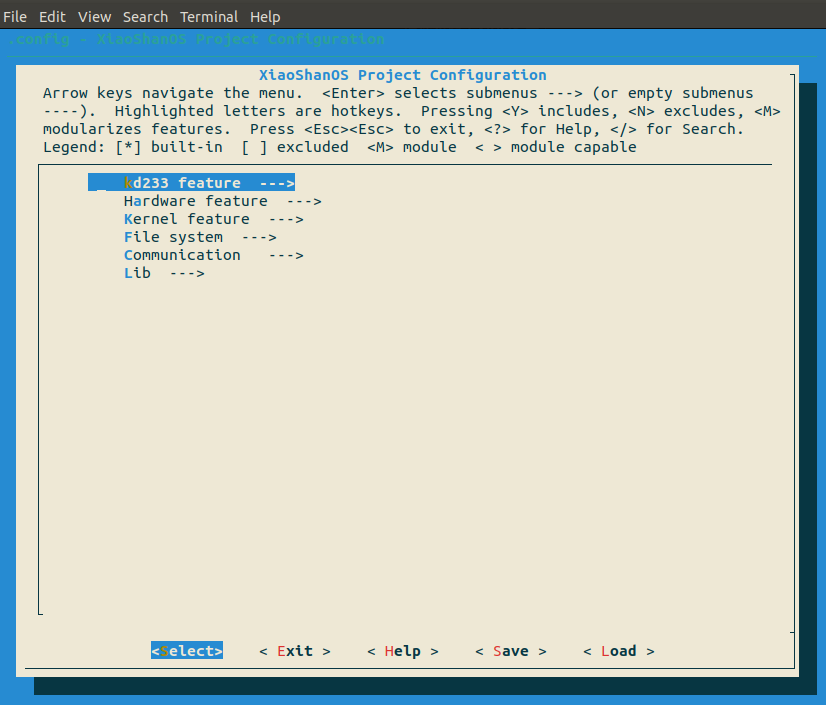
++ 配置初始化
+ + 以stm32f407-st-discovery为例,进行开始系统参数。
+
+
+
+
+ $ make BOARD=stm32f407-st-discovery menuconfig
+ XS_ 为前缀开头。
+
+ + 以kd233为例,进行开始系统参数。
+
+ $ make BOARD=KD233 menuconfig
+
+ XS_ 为前缀开头。
+
+## 编译命令
+ 通用编译命令, 默认为BOARD=KD233
+
+ $ make [BOARD=<所选开发板>]
++ 当 make 命令被执行时,它会扫描当前目录下Makefile或makefile文件找到目标以及其依赖。如果这些依赖自身也是目标,继续为这些依赖扫描Makefile 建立其依赖关系,然后编译它们。
++ 创建build目录,目录下包含了各种目标文件、.bin、.elf等文件
+ + 目标文件,以.o结尾的文件
+ + .bin 二进制文件
+ + .elf 可执行文件
+## 烧录命令
++ 基于ARM开发板的烧录命令
+
+ $ sudo st-flash write <生成的.elf文件> 0x8000000
++ 基于RISC-V开发板的烧录命令
+
+ $ sudo kflash <生成的.elf文件> -t
+
+## 运行界面
++ XiUOS 运行在ARM开发板
+
+XiUOS 运行在RISC-V开发板
+
+
+
+
+> 尝试借助gitee下载源码
+
+
+
+
+> * Operation feedback: enable the users to clearly perceive their operations by style updates and interactive effects;
+> * Visual feedback: reflect current state by updating or rearranging elements of the page.
+
+
+
+
+> * Simplify the process: keep operating process simple and intuitive;
+> * Definite and clear: enunciate your intentions clearly so that the users can quickly understand and make decisions;
+> * Easy to identify: the interface should be straightforward, which helps the users to identify and frees them from memorizing and recalling.
+
+
+
+
+> * Decision making: giving advices about operations is acceptable, but do not make decisions for the users;
+> * Controlled consequences: users should be granted the freedom to operate, including canceling, aborting or terminating current operation.
+
+
+
+
\ No newline at end of file
diff --git a/docs/doc/hwsupport/aiit-arm32.md b/docs/doc/hwsupport/aiit-arm32.md
new file mode 100644
index 0000000..eff002e
--- /dev/null
+++ b/docs/doc/hwsupport/aiit-arm32.md
@@ -0,0 +1,8 @@
+# aiit-arm32
+## 综述
+
+
+
AIIT-ARM32
+
+
XiUOS最新分支支持aiit-arm32开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
+
+
+
+
AIIT-ARM64
+
+
XiUOS最新分支支持stm32f407-st-discovery开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
1. Up to 1 Mbyte of Flash memory
+2. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
+3. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
+4. 512 bytes of OTP memory
+5. Flexible static memory controller supporting Compact Flash, SRAM, PSRAM, NOR and NAND memories
++ LCD parallel interface, 8080/6800 modes
++ Clock, reset and supply management
+1. 1.8 V to 3.6 V application supply and I/Os
+2. POR, PDR, PVD and BOR
+3. 4-to-26 MHz crystal oscillator
+4. Internal 16 MHz factory-trimmed RC (1% accuracy)
+5. 32 kHz oscillator for RTC with calibration
+6. Internal 32 kHz RC with calibration
++ Low-power operation
+1. Sleep, Stop and Standby modes
+2. VBAT supply for RTC, 20×32 bit backup registers + optional 4 KB backup SRAM
++ 3×12-bit, 2.4 MSPS A/D converters: up to 24 channels and 7.2 MSPS in triple interleaved mode
++ 2×12-bit D/A converters
++ General-purpose DMA: 16-stream DMA controller with FIFOs and burst support
++ Up to 17 timers: up to twelve 16-bit and two 32-bit timers up to 168 MHz, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input
++ Debug mode
+1. Serial wire debug (SWD) & JTAG interfaces
+2. Cortex-M4 Embedded Trace Macrocell™
++ Up to 140 I/O ports with interrupt capability
+1. Up to 136 fast I/Os up to 84 MHz
+2. Up to 138 5 V-tolerant I/Os
++ Up to 15 communication interfaces
+1. Up to 3 × I2 C interfaces (SMBus/PMBus)
+2. Up to 4 USARTs/2 UARTs (10.5 Mbit/s, ISO 7816 interface, LIN, IrDA, modem control)
+3. Up to 3 SPIs (42 Mbits/s), 2 with muxed full-duplex I2S to achieve audio class accuracy via internal audio PLL or external clock
+4. 2 × CAN interfaces (2.0B Active)
+5. SDIO interface
++ Advanced connectivity
+1. USB 2.0 full-speed device/host/OTG controller with on-chip PHY
+2. USB 2.0 high-speed/full-speed device/host/OTG controller with dedicated DMA, on-chip full-speed PHY and ULPI
+3. 10/100 Ethernet MAC with dedicated DMA: supports IEEE 1588v2 hardware, MII/RMII
++ 8- to 14-bit parallel camera interface up to 54 Mbytes/s
++ True random number generator
++ CRC calculation unit
++ 96-bit unique ID
++ RTC: subsecond accuracy, hardware calendar
+
+## 支持的功能
+
diff --git a/docs/doc/hwsupport/hifive1-rev.md b/docs/doc/hwsupport/hifive1-rev.md
new file mode 100644
index 0000000..b2f6b1e
--- /dev/null
+++ b/docs/doc/hwsupport/hifive1-rev.md
@@ -0,0 +1,46 @@
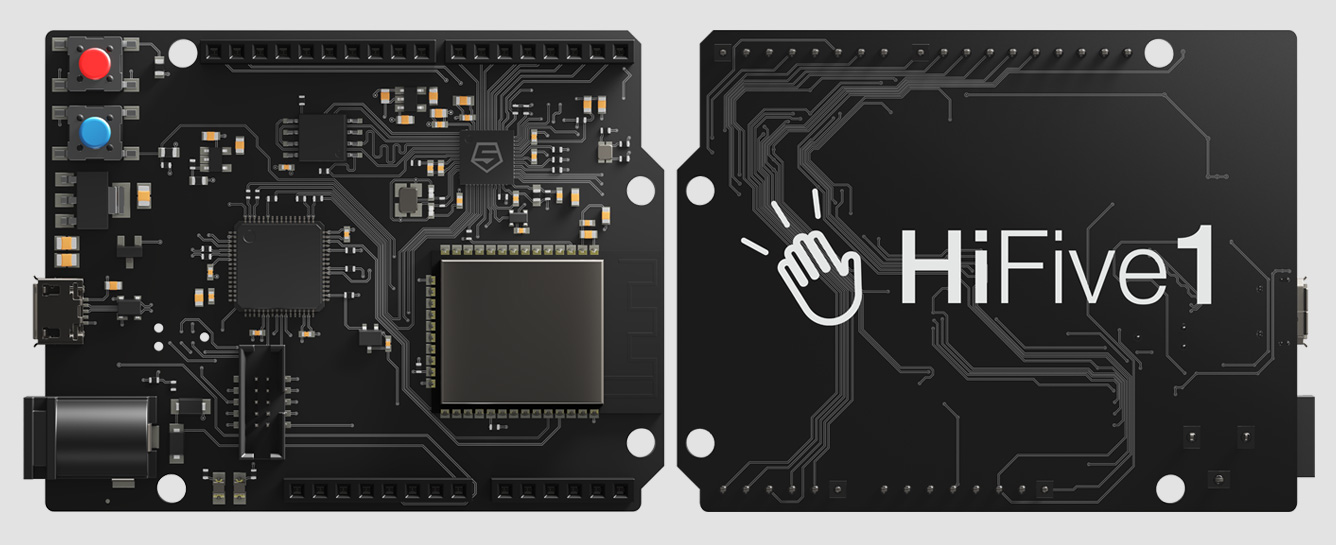
+# RISC-V HIFIVE1-REV-B
+
+## 综述
+
+
+
+
+
HIFIVE1-REV-B
+
+
XiUOS最新分支支持IFIVE1-REV-B开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
2 C: 1
++ Networking: WiFi/BT (off-chip)
++ External Interrupt Pins: 19
++ External Wakeup Pins: 1
++ Flash Memory: 32 Mbit Off-Chip (ISSI SPI Flash)
++ Host Interface (microUSB): Program, Debug, and Serial Communication
++ Debug: Segger J-Link, drag/drop code download
++ Weight: 22 g
+
+### 更多信息[查看网址](https://www.sifive.com/boards/hifive1-rev-b)
+
+## 支持的功能
+
+## 编程与调试
+针对**HIFIVE1-REV-B** 开发板的配置和刷新信息,详见[开发环境构建](/environment/debug.html)
+
+
\ No newline at end of file
diff --git a/docs/doc/hwsupport/kd233.md b/docs/doc/hwsupport/kd233.md
new file mode 100644
index 0000000..3b96c19
--- /dev/null
+++ b/docs/doc/hwsupport/kd233.md
@@ -0,0 +1,55 @@
+# RISC-V KD233
+## 综述
+
+
+
+
+
KD233
+
+
XiUOS最新分支支持KD233开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
2 C、I2 S、WDT、TIMER、RTC等等
+### 更多信息
++ [KD233](https://canaan-creative.com/product/kendryteai)
+
+## 支持的功能
+| 名称 | 控制器 | 驱动描述 |
+| ---- | ---- | ---- |
+| AUDIO | on-chip | audio音频控制 |
+| CAMERA | on-chip | camera驱动控制 |
+| DMA | on-chip | dma驱动控制 |
+| FFT | on-chip | 快速傅里叶变换 |
+| GPIO | on-chip | gpio 输入输出控制 |
+| I2 C | on-chip | i2 c总线 |
+| I2 S | on-chip | i2 s总线 |
+| KPU | on-chip | kpu计算架构 |
+| LCD | on-chip | lcd 液晶显示器控制 |
+| PLIC | on-chip | 中断控制 |
+| PWM | on-chip | pwm驱动控制 |
+| RTC | on-chip | rtc实时时钟驱动控制 |
+| SECURITY | on-chip | 安全 |
+| SPI | on-chip | spi总线驱动控制 |
+| SYS_CLOCK | on-chip | 系统时钟控制 |
+| TIMER | on-chip | timer重置和计时控制 |
+| UART | on-chip | uart串口驱动控制 |
+| VIDEO | on-chip | video视频控制器驱动 |
+| WATCHDOG | on-chip | watchdog看门狗控制 |
+
+## 编程与调试
+针对**KD233** 开发板的配置和刷新信息,详见[开发环境构建](/environment/bianyi.html)
\ No newline at end of file
diff --git a/docs/doc/hwsupport/maxgo.md b/docs/doc/hwsupport/maxgo.md
new file mode 100644
index 0000000..bbc878d
--- /dev/null
+++ b/docs/doc/hwsupport/maxgo.md
@@ -0,0 +1,46 @@
+# RISC-V MAXGO
+## 综述
+
+
+
+
+
MAXGO
+
+
XiUOS最新分支支持MAXGO开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
2 C、I2 S、WDT、TIMER、RTC等等
+### 更多信息
++ [KD233](https://canaan-creative.com/product/kendryteai)
+
+## 支持的功能
+| 名称 | 控制器 | 驱动描述 |
+| ---- | ---- | ---- |
+| CAMERA | on-chip | camera驱动控制 |
+| DMA | on-chip | dma驱动控制 |
+| GPIO | on-chip | gpio 输入输出控制 |
+| I2 C | on-chip | i2 c总线 |
+| I2 S | on-chip | i2 s总线 |
+| LCD | on-chip | lcd 液晶显示器控制 |
+| PLIC | on-chip | 中断控制 |
+| SPI | on-chip | spi总线驱动控制 |
+| SYS_CLOCK | on-chip | 系统时钟控制 |
+| UART | on-chip | uart串口驱动控制 |
+
+## 编程与调试
+针对**MAXGO** 开发板的配置和刷新信息,详见[开发环境构建](/environment/bianyi.html)
\ No newline at end of file
diff --git a/docs/doc/hwsupport/stm32f407-st-discovery.md b/docs/doc/hwsupport/stm32f407-st-discovery.md
new file mode 100644
index 0000000..e21e896
--- /dev/null
+++ b/docs/doc/hwsupport/stm32f407-st-discovery.md
@@ -0,0 +1,63 @@
+# stm32f407-st-discovery
+## 综述
+
+
+
+
+
STM32F4DISCOVERY
+
+
XiUOS最新分支支持stm32f407-st-discovery开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
1. Debug port
+2. Virtual Com port (with new order code only)
+3. Mass storage (with new order code only)
++ Board power supply: through USB bus or from an external 5 V supply voltage
++ External application power supply: 3 V and 5 V
++ LIS302DL or LIS3DSH ST MEMS 3-axis accelerometer
++ MP45DT02 ST-MEMS audio sensor omni-directional digital microcontroller
++ CS43L22 audio DAC with integrated class D speaker driver
++ Eight LEDs:
+1. LD1 (red/green) for USB communication
+2. LD2 (red) for 3.3 V power on
+3. Four user LEDs, LD3 (orange), LD4 (green), LD5 (red) and LD6 (blue)
+4. USB OTG LEDs LD7 (green) VBUS and LD8 (red) over-current
++ Two push-buttons (user and reset)
++ USB OTG FS with micro-AB connector
++ Extension header for all LQFP100 I/Os for quick connection to prototyping board and easy probing
++ Comprehensive free software including a variety of examples, part of STM32CubeF4 package or STSW-STM32068 to use legacy standard libraries.
+
+### 更多信息
++ [STM32F4DISCOVERY](https://www.st.com/content/st_com/en/products/evaluation-tools/product-evaluation-tools/mcu-mpu-eval-tools/stm32-mcu-mpu-eval-tools/stm32-discovery-kits/stm32f4discovery.html#)
+
+## 支持的功能
+| 名称 | 控制器 | 驱动描述 |
+| ---- | ---- | ---- |
+| DMA | on-chip | DMA驱动控制 |
+| GPIO | on-chip | gpio 输入输出控制 |
+| I2C | on-chip | i2c 控制 |
+| LCD | on-chip | lcd 液晶显示器控制 |
+| RTC | on-chip | rtc 实时始终控制 |
+| SPI | on-chip | spi 总线系统控制 |
+| TIMER | on-chip | timer重置和计时控制 |
+| UART | on-chip | uart串口驱动控制 |
+| USB | on-chip | usb驱动控制 |
+| WATCHDOG | on-chip | watchdog看门口控制 |
+
+## 编程与调试
+针对**stm32f407-st-discovery** 开发板的配置和刷新信息,详见[开发环境构建](/environment/bianyi.html)
+
+
\ No newline at end of file
diff --git a/docs/doc/hwsupport/stm32f407zgt6.md b/docs/doc/hwsupport/stm32f407zgt6.md
new file mode 100644
index 0000000..31f3e6e
--- /dev/null
+++ b/docs/doc/hwsupport/stm32f407zgt6.md
@@ -0,0 +1,85 @@
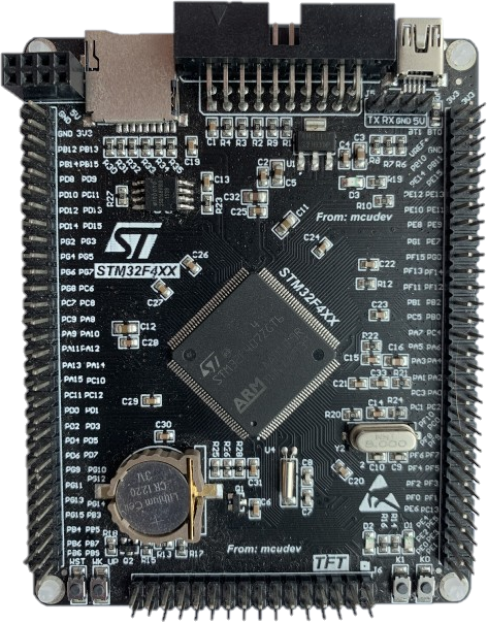
+# stm32f407zgt6
+## 综述
+
+
+
STM32F407ZET6
+
+
XiUOS最新分支支持stm32f407zgt6开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。
+
1. Up to 1 Mbyte of Flash memory
+2. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
+3. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
+4. 512 bytes of OTP memory
+5. Flexible static memory controller supporting Compact Flash, SRAM, PSRAM, NOR and NAND memories
++ LCD parallel interface, 8080/6800 modes
++ Clock, reset and supply management
+1. 1.8 V to 3.6 V application supply and I/Os
+2. POR, PDR, PVD and BOR
+3. 4-to-26 MHz crystal oscillator
+4. Internal 16 MHz factory-trimmed RC (1% accuracy)
+5. 32 kHz oscillator for RTC with calibration
+6. Internal 32 kHz RC with calibration
++ Low-power operation
+1. Sleep, Stop and Standby modes
+2. VBAT supply for RTC, 20×32 bit backup registers + optional 4 KB backup SRAM
++ 3×12-bit, 2.4 MSPS A/D converters: up to 24 channels and 7.2 MSPS in triple interleaved mode
++ 2×12-bit D/A converters
++ General-purpose DMA: 16-stream DMA controller with FIFOs and burst support
++ Up to 17 timers: up to twelve 16-bit and two 32-bit timers up to 168 MHz, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input
++ Debug mode
+1. Serial wire debug (SWD) & JTAG interfaces
+2. Cortex-M4 Embedded Trace Macrocell™
++ Up to 140 I/O ports with interrupt capability
+1. Up to 136 fast I/Os up to 84 MHz
+2. Up to 138 5 V-tolerant I/Os
++ Up to 15 communication interfaces
+1. Up to 3 × I2 C interfaces (SMBus/PMBus)
+2. Up to 4 USARTs/2 UARTs (10.5 Mbit/s, ISO 7816 interface, LIN, IrDA, modem control)
+3. Up to 3 SPIs (42 Mbits/s), 2 with muxed full-duplex I2S to achieve audio class accuracy via internal audio PLL or external clock
+4. 2 × CAN interfaces (2.0B Active)
+5. SDIO interface
++ Advanced connectivity
+1. USB 2.0 full-speed device/host/OTG controller with on-chip PHY
+2. USB 2.0 high-speed/full-speed device/host/OTG controller with dedicated DMA, on-chip full-speed PHY and ULPI
+3. 10/100 Ethernet MAC with dedicated DMA: supports IEEE 1588v2 hardware, MII/RMII
++ 8- to 14-bit parallel camera interface up to 54 Mbytes/s
++ True random number generator
++ CRC calculation unit
++ 96-bit unique ID
++ RTC: subsecond accuracy, hardware calendar
+
+
+### 更多信息
++ [STM32F407ZET6](https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-high-performance-mcus/stm32f4-series/stm32f407-417/stm32f407ze.html)
+
+## 支持的功能
+| 名称 | 控制器 | 驱动描述 |
+| ---- | ---- | ---- |
+| DMA | on-chip | DMA驱动控制 |
+| GPIO | on-chip | gpio 输入输出控制 |
+| I2C | on-chip | i2c 控制 |
+| LCD | on-chip | lcd 液晶显示器控制 |
+| RTC | on-chip | rtc 实时始终控制 |
+| SPI | on-chip | spi 总线系统控制 |
+| TIMER | on-chip | timer重置和计时控制 |
+| UART | on-chip | uart串口驱动控制 |
+| USB | on-chip | usb驱动控制 |
+| WATCHDOG | on-chip | watchdog看门口控制 |
+
+## 编程与调试
+针对**stm32f407zet6** 开发板的配置和刷新信息,详见[开发环境构建](/environment/bianyi.html)
+
+
\ No newline at end of file
diff --git a/docs/doc/kernel.md b/docs/doc/kernel.md
deleted file mode 100644
index 3658edf..0000000
--- a/docs/doc/kernel.md
+++ /dev/null
@@ -1 +0,0 @@
-# 内核
diff --git a/docs/doc/kernel/imagesrc/fifo_menuconfig.png b/docs/doc/kernel/imagesrc/fifo_menuconfig.png
new file mode 100644
index 0000000..e6a3825
Binary files /dev/null and b/docs/doc/kernel/imagesrc/fifo_menuconfig.png differ
diff --git a/docs/doc/kernel/imagesrc/fig1.png b/docs/doc/kernel/imagesrc/fig1.png
new file mode 100644
index 0000000..fb00332
Binary files /dev/null and b/docs/doc/kernel/imagesrc/fig1.png differ
diff --git a/docs/doc/kernel/imagesrc/fig2.png b/docs/doc/kernel/imagesrc/fig2.png
new file mode 100644
index 0000000..48a27ce
Binary files /dev/null and b/docs/doc/kernel/imagesrc/fig2.png differ
diff --git a/docs/doc/kernel/imagesrc/fig3.png b/docs/doc/kernel/imagesrc/fig3.png
new file mode 100644
index 0000000..c9540be
Binary files /dev/null and b/docs/doc/kernel/imagesrc/fig3.png differ
diff --git a/docs/doc/kernel/imagesrc/fig9.png b/docs/doc/kernel/imagesrc/fig9.png
new file mode 100644
index 0000000..918bef3
Binary files /dev/null and b/docs/doc/kernel/imagesrc/fig9.png differ
diff --git a/docs/doc/kernel/imagesrc/rr_menuconfig.png b/docs/doc/kernel/imagesrc/rr_menuconfig.png
new file mode 100644
index 0000000..ea05613
Binary files /dev/null and b/docs/doc/kernel/imagesrc/rr_menuconfig.png differ
diff --git a/docs/doc/kernel/imagesrc/schedule.png b/docs/doc/kernel/imagesrc/schedule.png
new file mode 100644
index 0000000..6e2882a
Binary files /dev/null and b/docs/doc/kernel/imagesrc/schedule.png differ
diff --git a/docs/doc/kernel/imagesrc/thread_status.jpg b/docs/doc/kernel/imagesrc/thread_status.jpg
new file mode 100755
index 0000000..1c0eb61
Binary files /dev/null and b/docs/doc/kernel/imagesrc/thread_status.jpg differ
diff --git a/docs/doc/kernel/mm.md b/docs/doc/kernel/mm.md
new file mode 100644
index 0000000..c91562f
--- /dev/null
+++ b/docs/doc/kernel/mm.md
@@ -0,0 +1,379 @@
+# 内存管理
+
+## 前言
+计算机系统中,变量、中间数据一般存放在 RAM 中,只有在实际使用时才将它们从 RAM 调入到 CPU 中进行运算。一些数据需要的内存大小需要在程序运行过程中根据实际情况确定,这就要求系统具有对内存空间进行动态管理的能力,在用户需要一段内存空间时,向系统申请,系统选择一段合适的内存空间分配给用户,用户使用完毕后,再释放回系统,以便系统将该段内存空间回收再利用。
+
+由于实时系统中对时间的要求非常严格,内存管理往往要比通用操作系统要求苛刻得多:
+
+1)分配内存的时间必须是确定的。一般内存管理算法是根据需要存储的数据的长度在内存中去寻找一个与这段数据相适应的空闲内存块,然后将数据存储在里面。而寻找这样一个空闲内存块所耗费的时间是不确定的,因此对于实时系统来说,这就是不可接受的,实时系统必须要保证内存块的分配过程在可预测的确定时间内完成,否则实时任务对外部事件的响应也将变得不可确定。
+
+2)随着内存不断被分配和释放,整个内存区域会产生越来越多的碎片,系统中还有足够的空闲内存,但因为它们地址并非连续,不能组成一块连续的完整内存块,会使得程序不能申请到大的内存。对于通用系统而言,这种不恰当的内存分配算法可以通过重新启动系统来解决,但是对于那些需要常年不间断地工作于野外的嵌入式系统来说,频繁的重启是无法接受的。
+
+3)嵌入式系统的资源环境也是不尽相同,不同的系统内存大小不同,如何为这些不同的系统,选择适合它们的高效率的内存分配算法,也是一个复杂的问题。
+
+XiUOS操作系统提供了独特的内存管理分配算法进行内存管理,通过静态内存管理和动态内存管理相结合,保证分配和释放内存的实时性,提高内存的使用率,有效地规避了内存碎片问题,同时增加了内存检索的速度。
+
+
+## 内存堆
+### 静态内存管理
+#### 静态内存划分
+静态内存包含2个链表。其中,每个链表都具有block_size静态内存块大小、total_count静态内存块的总个数、free_count空闲内存块的总个数和free_list空闲链表这四个属性。
+其中block_size属性记录了当前链表中每个静态内存块的大小,
+total_count属性记录了系统初始化之后分配给该链表中静态内存块的总个数,
+free_count属性记录了该链表中还可以分配给用户静态内存块的个数,
+free_list属性则真正指向各个空闲静态内存块。
+
+下图为静态内存链表的具体情况。图中包括两个静态链表1和2。静态链表头1指向的内存池中存放的静态内存块的大小都是32字节,静态链表头2所指向的内存池中存放的静态内存块的大小都是64字节。此外,系统分别配置了静态链表头1和静态链表头2中静态内存块的total_count个数为256和128。因此,静态链表头1最多可以响应用户256次的小于32字节的内存请求,静态链表头2最多可以响应用户128次的介于33-64字节之间的内存请求,一旦对应的静态内存块分配完了,系统会向动态内存区域寻求内存空间分配。
+
+
+
+
+
+
+
+
+
+
+
+ 申请的内存范围
+
+
+ 分配动态链表头
+
+
+
+
+ 1 ~ 31字节
+
+
+ freeList1
+
+
+
+
+ 32 ~ 63字节
+
+
+ freeList2
+
+
+
+
+ 64 ~127字节
+
+
+ freeList3
+
+
+
+
+ ……
+
+
+ ……
+
+
+
+
+ 8192 ~MAX(MAX由系统配置)
+
+
+ freeList10
+
+
+
+
+
+
+
+
+
+
+
+
+
+ 体积小,携带方便、安装简捷
+ 测量精度高,量程宽,稳定性好
+ 结构设计合理,外观质量佳
+ 数据信息线性度好,信号传输距离长,抗外界干扰能力强
+
+
+
+
+
+
+ 接入 外部线
+
+ 电源正
+ 红色
+ 或
+ 棕色
+
+
+ 电源负
+ 蓝色
+ 黑色
+
+
+ 信号
+ 黄色
+ 蓝色
+
+
+
+
+
+ 线色 棕色
+ 蓝色
+ 灰色
+ 黑色
+
+
+ 485 电源正
+ 485A
+ 485B
+ 电源负
+
+
+
+
+
+ 电压型 量程
+ 0~32. 4 m/s
+
+
+ 供电电压
+ 7V~24 V DC
+
+
+ 输出信号
+ 0.4~2V
+
+
+ 风速值
+ (输出电压-0.4)/1.6*32.4
+
+
+ 供电电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 0~5 V
+
+
+ 风速值
+ 输出电压/5*32.4
+
+
+ 供电电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 1~5 V
+
+
+ 风速值
+ (输出电压-1)/4*32.4
+
+
+ 电流型 量程
+ 0~32. 4 m/s
+
+
+ 供电电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 4~20 mA
+
+
+ 负载能力
+ ≤200Ω
+
+
+ 风速值
+ (输出电流-4)/16*32.4
+
+
+ 脉冲型 量程
+ 0~60 m/s
+
+
+ 供电电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 脉冲(每个脉冲对应0.88m/s)
+
+
+ 信号说明
+ 内加上拉电阻逻辑1=VCC,逻辑0=GND
+
+
+ 485型 量程
+ 0~32. 4 m/s
+
+
+ 供电电压
+ 7V~24 V DC
+
+
+ 通信协议
+ Modbus-RTU
+
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+
+
+ 0x02
+ 0x03
+ 0x00
+ 0x00
+ 0x00
+ 0x01
+ 0x84
+ 0x39
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+
+
+ 0x02
+ 0x03
+ 0x02
+ 0x00
+ 0x1F
+ 0xBD
+ 0x8C
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+
+
+ 0x02 0x06
+ 0x10
+ 0x00
+ 0x00
+ 0x03 0xCD
+ 0x38
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+ 9
+ 10
+
+
+ 0x02 0x10
+ 0x10
+ 0x00
+ 0x00
+ 0x01
+ 0x02
+ 0x00
+ 0x03 0xE3
+ 0x60
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+
+
+ 0x00
+ 0x06
+ 0x10
+ 0x00
+ 0x00
+ 0x03 0xCC
+ 0xDA
+
+
+
+
+
+
+
+
+
+
+ 自体积小,重量轻,野外携带安装极为方便,防水防震结构设计,可在野外全天候使用
+ 检测精度高,系统采用低功耗环保节能设计,数字处理技术
+ 量程宽,稳定性好
+ 数据信息显示线性度好,信号传输距离长,抗外界干扰能力强
+
+
+
+
+
+
+ 接入 外部线
+
+ 电源正
+ 红色
+ 或
+ 棕色
+
+
+ 电源负
+ 蓝色
+ 黑色
+
+
+ 信号
+ 黄色
+ 蓝色
+
+
+
+
+
+ 线色 棕色
+ 蓝色
+ 灰色
+ 黑色
+
+
+ 485 电源正
+ 485B
+ 485A
+ 电源负
+
+
+
+
+
+ 电压型 输入电压
+ 7V~24V DC
+
+
+ 输出信号
+ 0.4~2V
+
+
+ 风向值
+ (输出电压-0.4)/1.6*360
+
+
+ 输入电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 0~5 V
+
+
+ 风向值
+ (输出电压-1)/4*360
+
+
+ 电流型 输入电压
+ 12V~24 V DC
+
+
+ 输出信号
+ 4~20mA
+
+
+ 风向值
+ (输出电流-4)/16*360
+
+
+ 485型 输入电压
+ 7V~24 V DC
+
+
+ 通信协议
+ Modbus-RTU
+
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+
+
+ 0x02
+ 0x03
+ 0x00
+ 0x00
+ 0x00
+ 0x01
+ 0x84
+ 0x39
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+
+
+ 0x02
+ 0x03
+ 0x02
+ 0x00
+ 0x1F
+ 0xBD
+ 0x8C
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+ 9
+ 10
+
+
+ 0x02 0x10
+ 0x10
+ 0x00
+ 0x00
+ 0x01
+ 0x02
+ 0x00
+ 0x03 0xE3
+ 0x60
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+ 9
+ 10
+
+
+ 0x00
+ 0x10
+ 0x10
+ 0x00
+ 0x00
+ 0x01
+ 0x02
+ 0x00
+ 0x03 0xFA
+ 0x00
+
+
+
+
+
+
+
+
+
+
+ 多种有害气体测量反应计算,可有效评估空气新鲜度;
+ 可检测VOC有机挥发物类、硫化物、氮氧化物、胺类、烃类、酮类、醇类、一氧化碳等多种无机气体;
+ 长寿命、检测稳定、可靠性高;
+ 快速响应;
+ 独立温湿度数字传感器,结合智能算法,环境适应性强;
+ 小体积低功耗;
+
+
+
+
+
+
+
+
+
+ 序号
+ TB600B模块
+ 备注
+
+
+ 1
+ TX
+ 接嵌入式系统RX引脚
+
+
+ 2
+ RX
+ 接嵌入式系统TX引脚
+
+
+ 3
+ GND
+ 模块公共地
+
+
+ 4
+ VCC
+ 供电电压,3.3 V~5.5 V
+
+
+
+
+
+ 波特率
+ 9600
+
+
+ 数据位
+ 8位
+
+
+ 停止位
+ 1位
+
+
+ 校验位
+ 无
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 切换命令
+ 主动上传
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x78
+ 0x40
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x47
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 切换命令
+ 主动上传
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x78
+ 0x41
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x46
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 传感器类型
+ 最大量程高位
+ 最大量程低位
+ 单位
+ 保留
+ 保留
+ 保留
+ 数据小数位数(bit[4]~bit[7]),数据正负号(bit[0]~bit[3])
+ 校验值
+
+
+ 0x18
+ 0x00
+ 0xC8
+ 0x02
+ 0x00
+ 0x00
+ 0x00
+ 0x01
+ 0x35
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 指令头1
+ 指令头2
+ 传感器类型
+ 最大量程高位
+ 最大量程低位
+ 单位
+ 数据小数位数(bit[4]~bit[7]),数据正负号(bit[0]~bit[3])
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0xD7
+ 0x18
+ 0x00
+ 0xC8
+ 0x02
+ 0x01
+ 0x00
+ 0x46
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 命令
+ 保留
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x86
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x79
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 命令
+ 气体浓度高位($ug/{m^3}$)
+ 气体浓度低位($ug/{m^3}$)
+ 满量程高位
+ 满量程低位
+ 气体浓度高位($ppb$)
+ 气体浓度低位($ppb$)
+ 校验值
+
+
+ 0xFF
+ 0x86
+ 0x00
+ 0x2A
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x30
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 命令
+ 保留
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x87
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x78
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 命令
+ 气体浓度高位($ug/{m^3}$)
+ 气体浓度低位($ug/{m^3}$)
+ 满量程高位
+ 满量程低位
+ 气体浓度高位($ppb$)
+ 气体浓度低位($ppb$)
+ 温度高位
+
+
+ 0xFF
+ 0x87
+ 0x00
+ 0x2A
+ 0x03
+ 0xE8
+ 0x00
+ 0x20
+ 0x09
+
+
+ 9
+ 10
+ 11
+ 12
+
+
+ 温度低位
+ 湿度高位
+ 湿度低位
+ 校验和
+
+
+ 0xC4
+ 0x13
+ 0x88
+ 0xDC
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+
+
+ 温度高8位
+ 温度低8位
+ 湿度高8位
+ 湿度低8位
+
+
+ 0x0A
+ 0x09
+ 0x11
+ 0xF4
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+
+
+ 温度高8位
+ 温度低8位
+ 湿度高8位
+ 湿度低8位
+ 校验和
+
+
+ 0x0A
+ 0x09
+ 0x11
+ 0xF4
+ 0xE8
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 命令
+ 气体浓度高位($ug/{m^3}$)
+ 气体浓度低位($ug/{m^3}$)
+ 满量程高位
+ 满量程低位
+ 气体浓度高位($ppb$)
+ 气体浓度低位($ppb$)
+ 校验值
+
+
+ 0xFF
+ 0x86
+ 0x00
+ 0x2A
+ 0x00
+ 0x00
+ 0x00
+ 0x20
+ 0x30
+
+
+
+
+
+
+
+
+
+
+ ppb级高精度环境监测应用;
+ 极强的抗干扰能力,对低浓度乙醇、CO、芳香烃、异味、烟气、空气清新剂等有很好的抗干扰能力;
+ 长寿命、检测稳定、可靠性高;
+ 快速响应;
+ 独立温湿度数字传感器,结合智能算法,环境适应性强;
+
+
+
+
+
+
+
+
+
+
+
+ ppb级高精度环境监测应用;
+ ppb级TVOC气体传感器;
+ 可对300多类以上的VOC气体反应;
+ 长寿命、检测稳定、可靠性高;
+ 快速响应;
+ 独立温湿度数字传感器,结合智能算法,环境适应性强;
+ 小体积低功耗;
+
+
+
+
+
+
+
+
+
+
+
+ 非色散红外技术,精确监测CO2
+ 定期自动校准和手动校准,可选
+
+
+
+
+
+
+ 检测气种
+ 二氧化碳
+
+
+ 应用原理
+ 非色散红外技术
+
+
+ 检测范围
+ 400ppm ~ 2000ppm可扩展为0~10000ppm
+
+
+ 测量周期
+ 4 秒
+
+
+ 准确度
+ ±50ppm±读数的3%
+
+
+ 响应时间(T90)
+ 120秒
+
+
+ 预热时间
+ 上电8秒(输出浓度)上电3分钟(准确输出)
+
+
+
+
+
+
+
+
+ 波特率
+ 9600
+
+
+ 数据位
+ 8位
+
+
+ 停止位
+ 1位
+
+
+ 校验位
+ 无
+
+
+
+
+
+ Byte1
+ ......
+ ByteN
+ 0x09
+ 校验字
+ 0x0d
+ 0x0a
+
+
+ 数据区
+ Tab
+ 校验区
+ 回车
+ 换行
+
+
+
+
+
+
+ 指令 功能名称 说明
+
+ R0
+ 读取传感器序列号及版本号
+ /
+
+
+ R4
+ 读取传感器量程及单位
+ /
+
+
+ R6
+ 读浓度
+ /
+
+
+ RA
+ 查看零点校准功能状态
+ 包括开关、进行阶段、周期、基准值
+
+
+ SA+时间(h)
+ 设定零点校准周期+开关
+ 时间为0时表示暂停此功能;时间大于0时表示开启此功能,并将周期设为相应时间
+
+
+ SC+浓度(ppm)
+ 设定零点校准基准值
+ /
+
+
+ B+浓度(ppm)
+ 单点标定
+ /
+
+
+ F0
+ 切换到F0模式
+ 传感器进入不主动发送浓度值状态
+
+
+ F1
+ 切换到F1模式
+ 传感器进入主动发送浓度值状态
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+
+
+ 0x52
+ 0x30
+ 0x09
+ 0x37
+ 0x45
+ 0x0D
+ 0x0A
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+
+
+ 0x52
+ 0x36
+ 0x09
+ 0x37
+ 0x38
+ 0x0D
+ 0x0A
+
+
+
+
+
+
+
+
+
+
+ 监测可燃气体和一氧化碳的浓度;
+ 具有燃气泄漏报警功能;
+ 具有燃气不完全燃烧报警功能。
+
+
+
+
+
+
+ 分型产品(可选)
+ 分型号 可探测气体 传感器
+
+ AS830
+ CO 和 CH4
+ SB-95-12
+
+
+ AS830/CO
+ CO
+ SB-500-12
+
+
+ AS830/CH4
+ CH4
+ SB-12A
+
+
+
+
+
+ 项目 规格
+
+ 供电电源
+ DC5V±10%,≤100mA监视状态:电流≤40mA 报警状态:电流≤70mA
+
+
+ 预热时间
+ 通电后 180s(3 分钟)*1
+
+
+ 报警方式
+ CO
+ 浓度低于 100ppm,不报警;浓度在 150ppm〜300ppm 区间,保持 180s,发出低段报警;浓度高于 300ppm 且保持 30s,发出高段报警。
+
+
+ CH4
+ 洁净空气,不报警;浓度高于 6%LEL,保持 30s,发出高段报警。
+
+
+ 注:报警区间和报警点可以依据客户要求设计。
+
+
+ 指示灯
+ 状态
+ 指示灯
+
+
+ 自检
+ 绿、红、黄色灯依次点亮
+
+
+ 预热
+ 绿灯 快速闪亮
+
+
+ 正常监视
+ 绿灯 慢速闪亮
+
+
+ 故障
+ 黄灯 快速闪亮
+
+
+ 报警
+ 甲烷报警: 红灯 常亮低段报警(一氧化碳):红灯 慢速闪亮高段报警(一氧化碳):红灯 快速闪亮
+
+
+ 蜂鸣器
+ 有源蜂鸣器距离 1 米处声压级 70dB〜95dB
+
+
+ 状态
+ 蜂鸣器
+
+
+ 自检
+ 短鸣一声
+
+
+ 预热
+ 预热完成短鸣一声,提醒退出预热状态
+
+
+ 故障
+ 每隔 10 秒“滴”一声
+
+
+ 报警
+ 低段报警:每隔 2 秒“滴、滴”慢速鸣叫 高段报警:每隔 0.5 秒“滴、滴”快速鸣叫
+
+
+ 按键
+ 内置微动开关,通过针孔,使用一个工具按压,实现自检和消音*2 功能
+
+
+ 输出方式
+ PWM 格式信号,峰值电平≤3.3V
+
+
+ 输出格式
+ 工作状态
+ 输出波形
+
+
+ 正常监视
+ 高电平
+
+
+ 电源偏移
+ 高 5ms 低 5ms 的方波
+
+
+ 传感器断路
+ 高 5ms 低 10ms 的方波
+
+
+ 传感器短路
+ 高 5ms 低 15ms 的方波
+
+
+ CO 低段报警
+ 高 5ms 低 20ms 的方波
+
+
+ CO 高端报警
+ 高 5ms 低 25ms 的方波
+
+
+ CH4 高段报警
+ 高 5ms 低 30ms 的方波
+
+
+
+
+
+
+
+
+
+ 引脚说明
+ MicroUSB (安卓手机充电器标准接口)
+
+
+ 4PIN端子(XH-A卧式)
+
+
+ VCC
+ 电源正 5 V
+
+
+ PWM
+ 状态输出引脚,输出 PWM 波形
+
+
+ GND
+ 电源地
+
+
+
+
+
+ 波特率
+ 9600
+
+
+ 数据位
+ 8位
+
+
+ 停止位
+ 1位
+
+
+ 校验位
+ 无
+
+
+
+
+
+
+
+
+
+
+ 选择性检测甲醛
+ 测量精度高
+ 响应速度快
+ 使用寿命长
+ 稳定可靠
+ 低功耗
+
+
+
+
+
+
+ Pin1
+ VCC
+ 3.3V-5V
+
+
+ Pin2
+ GND
+
+
+ Pin3
+ RST
+ 复位
+
+
+ Pin4
+ SW
+ 程序接口
+
+
+ Pin5
+ NC
+ 悬空
+
+
+ Pin6
+ TXD
+ 传感器发送引脚
+
+
+ Pin7
+ RXD
+ 传感器接收引脚
+
+
+
+
+
+ 产品型号
+ WZ-H3-K
+
+
+ 检测气体
+ 甲醛
+
+
+ 检测量程
+ 0-2ppm
+
+
+ 最大过载
+ 5ppm
+
+
+ 供电电压
+ 3.3-5V
+
+
+ 响应时间(T90)
+ <120S
+
+
+ 分辨率
+ 0.01ppm
+
+
+ 检测精度
+ ±30ppb 或±10%取大值(25±3℃)(50±5%RH)
+
+
+
+
+
+ 波特率
+ 9600
+
+
+ 数据位
+ 8位
+
+
+ 停止位
+ 1位
+
+
+ 校验位
+ 无
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 气体名称
+ 单位
+ 小数位数无
+ 气体浓度高位
+ 气体浓度低位
+ 满量程高位
+ 满量程低位
+ 校验值
+
+
+ 0xFF
+ CH2O=0x17
+ Ppb=0x04
+ 0x00
+ 0x00
+ 0x25
+ 0x07
+ 0xD0
+ 0x25
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 切换命令
+ 问答
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x78
+ 0x41
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x46
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 切换命令
+ 主动上传
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x78
+ 0x40
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x47
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 保留
+ 命令
+ 保留
+ 保留
+ 保留
+ 保留
+ 保留
+ 校验值
+
+
+ 0xFF
+ 0x01
+ 0x86
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x00
+ 0x79
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+ 5
+ 6
+ 7
+ 8
+
+
+ 起始位
+ 命令
+ 气体浓度高位(ug/m3)
+ 气体浓度低位(ug/m3)
+ 保留
+ 保留
+ 气体浓度高位(ppb)
+ 气体浓度低位(ppb)
+ 校验值
+
+
+ 0xFF
+ 0x86
+ 0x00
+ 0x2A
+ 0x00
+ 0x00
+ 0x00
+ 0x20
+ 0x30
+
+
+
+
+
+
+
+
+
+
+ 实时检测输出
+ 数据准确可靠
+ 最小分辨粒径 0.3 微米
+ 特定激光防衰减恒定亮度功能
+ 具备抗干扰能力
+ 标准 TTL 串口数据输出
+ 小尺寸易安装
+
+
+
+
+
+
+ Pin1
+ VCC
+ 电源 5V
+
+
+ Pin2
+ GND
+ 电源地
+
+
+ Pin3
+ WKUP
+ 高电平或悬空:工作状态;低电平:休眠状态.TTL 电平@3.3V
+
+
+ Pin4
+ RXD
+ 串口接收,TTL 电平@3.3V
+
+
+ Pin5
+ TXD
+ 串口发送,TTL 电平@3.3V
+
+
+ Pin6
+ REST
+ 传感器复位信号 TTL 电平@3.3V,低电平复位
+
+
+ Pin7
+ NC
+ 悬空
+
+
+ Pin8
+ NC
+ 悬空
+
+
+
+
+
+ 产品型号
+ PS5308/PS5308A
+
+
+ 颗粒物测量范围
+ PM2.5(PM10 选配)
+
+
+ 检测量程
+ 0~1000 ug/ m³
+
+
+ 颗粒物质量浓度一致性
+ ≥100 ug/ m³:±10%<100 ug/ m³:±10 ug/ m³
+
+
+ 颗粒物质量浓度准确性(参考标准:TSI 8530)
+ ≥100 ug/ m³:±10%<100 ug/ m³:±10 ug/ m³
+
+
+ 电源电压
+ DC 5±0.5V,纹波<50mV
+
+
+
+
+
+
+
+ 波特率
+ 9600
+
+
+ 数据位
+ 8位
+
+
+ 停止位
+ 1位
+
+
+ 校验位
+ 无
+
+
+
+
+
+ 字节序号
+ 数据
+ 定义
+
+
+ 0
+ 0x44
+ 起始符 1
+
+
+ 1
+ 0x4D
+ 起始符 2
+
+
+ 2
+ 0x00
+ 数据帧长度(字节 4 数据至校验位)
+
+
+ 3
+ 0x1C
+
+
+ 4
+ XX
+ PM1.0 浓度值(进风口带 60~80 目滤网时),单位:ug/m³
+
+
+ 5
+ XX
+
+
+ 6
+ XX
+ PM2.5 浓度值(进风口带 60~80 目滤网时),单位:ug/m³
+
+
+ 7
+ XX
+
+
+ 8
+ XX
+ PM10 浓度值(进风口带 60~80 目滤网时),单位:ug/m³
+
+
+ 9
+ XX
+
+
+ 10
+ XX
+ PM1.0 浓度值(进出风口无障碍物时),单位:ug/m³
+
+
+ 11
+ XX
+
+
+ 12
+ XX
+ PM2.5 浓度值(进出风口无障碍物时),单位:ug/m³
+
+
+ 13
+ XX
+
+
+ 14
+ XX
+ PM10 浓度值(进出风口无障碍物时),单位:ug/m³
+
+
+ 15
+ XX
+
+
+ 16
+ XX
+ 0.1 升空气中直径在 0.3um 以上颗粒物个数
+
+
+ 17
+ XX
+
+
+ 18
+ XX
+ P0.1 升空气中直径在 0.5um 以上颗粒物个数
+
+
+ 19
+ XX
+
+
+ 20
+ XX
+ 0.1 升空气中直径在 1.0um 以上颗粒物个数
+
+
+ 21
+ XX
+
+
+ 22
+ XX
+ 0.1 升空气中直径在 2.5um 以上颗粒物个数
+
+
+ 23
+ XX
+
+
+ 24
+ XX
+ 0.1 升空气中直径在 5.0um 以上颗粒物个数
+
+
+ 25
+ XX
+
+
+ 26
+ XX
+ 0.1 升空气中直径在 10um 以上颗粒物个数
+
+
+ 27
+ XX
+
+
+ 28
+ XX
+
+
+ 29
+ XX
+
+
+ 30
+ XX
+ 校验和=字节 0 数据+字节 1 数据+„„+字节 29 数据
+
+
+ 31
+ XX
+
+
+
+
+
+
+
+
+
+
+
+ 适合智能的高精度测量和数据采集,输出高精度的压力(或高度)和温度测量数据。
+ 与加速度计相互搭配,在没有GPS讯号的环境下,提供可靠的楼层侦测能力,以实现三维(3D)室内导航。
+ 可以检测:温度,大气压强,海拔高度。
+
+
+
+
+
+
+ 序号
+ BMP180模块
+ 备注
+
+
+ 1
+ VIN
+ 供电电压,1.8 V~3.6 V,典型值2.5 V
+
+
+ 2
+ GND
+ 模块公共地
+
+
+ 3
+ SCL
+ I2C 时钟线
+
+
+ 4
+ SDA
+ I2C 数据线
+
+
+
+
+
+
+
+
+ 1
+ 棕线
+ VCC/DC12V
+
+
+ 2
+ 黑线
+ GND/电源线
+
+
+ 3
+ 蓝线
+ RXD
+
+
+ 4
+ 黄线
+ TXD
+
+
+
+
+
+ 0
+ 1
+ 2
+ 3
+ 4
+
+
+ 0xAA
+ 0x02
+ 0x21
+ 0x23
+ 0xFF
+
+
+
 +
+  +
+  +
+  +
+ +
+
+
+ +
+
+
+ +
+ +
+
+
+ +
+ +
+
+
+ +
+
+
+ +
+ +
+
+
+ +
+ +
+ +
+ +
+ +
+ +
+ + 对应的配置信息将存放在board/stm32f407-st-discovery/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
+
+ + 以kd233为例,进行开始系统参数。
+
+ $ make BOARD=KD233 menuconfig
+
+
+ 对应的配置信息将存放在board/stm32f407-st-discovery/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
+
+ + 以kd233为例,进行开始系统参数。
+
+ $ make BOARD=KD233 menuconfig
+
+  + 对应的配置信息将存放在board/kd233/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
+
+## 编译命令
+ 通用编译命令, 默认为BOARD=KD233
+
+ $ make [BOARD=<所选开发板>]
++ 当 make 命令被执行时,它会扫描当前目录下Makefile或makefile文件找到目标以及其依赖。如果这些依赖自身也是目标,继续为这些依赖扫描Makefile 建立其依赖关系,然后编译它们。
++ 创建build目录,目录下包含了各种目标文件、.bin、.elf等文件
+ + 目标文件,以.o结尾的文件
+ + .bin 二进制文件
+ + .elf 可执行文件
+## 烧录命令
++ 基于ARM开发板的烧录命令
+
+ $ sudo st-flash write <生成的.elf文件> 0x8000000
++ 基于RISC-V开发板的烧录命令
+
+ $ sudo kflash <生成的.elf文件> -t
+
+## 运行界面
++ XiUOS运行在ARM开发板
+
+
+ 对应的配置信息将存放在board/kd233/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
+
+## 编译命令
+ 通用编译命令, 默认为BOARD=KD233
+
+ $ make [BOARD=<所选开发板>]
++ 当 make 命令被执行时,它会扫描当前目录下Makefile或makefile文件找到目标以及其依赖。如果这些依赖自身也是目标,继续为这些依赖扫描Makefile 建立其依赖关系,然后编译它们。
++ 创建build目录,目录下包含了各种目标文件、.bin、.elf等文件
+ + 目标文件,以.o结尾的文件
+ + .bin 二进制文件
+ + .elf 可执行文件
+## 烧录命令
++ 基于ARM开发板的烧录命令
+
+ $ sudo st-flash write <生成的.elf文件> 0x8000000
++ 基于RISC-V开发板的烧录命令
+
+ $ sudo kflash <生成的.elf文件> -t
+
+## 运行界面
++ XiUOS运行在ARM开发板
+
+ +
++ XiUOS运行在RISC-V开发板
+
+
++ XiUOS运行在RISC-V开发板
+ +
+## FAQ
+
+
+## FAQ
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+  +
+  +
+  +
+
+
+ +
+  +
+  +
+  +
+
+
+ +
+  +
+
+
+ +
+  +
+  +
+  +
+
+
+